


キヤノンが長年培った“ A s s e t ”で F A 市場に新たな『価値』を提供。
このカタログについて
| ドキュメント名 | 【キヤノン】CANON INDUSTRIAL IMAGING PLATFORM |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 9.8Mb |
| 取り扱い企業 | 株式会社RYODEN (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
H1-H4_入稿.pdf
キヤノンが長年培った“As s e t”で
FA市場に新たな『価値』を提供。
NVS商品企画第一課
2019年12月現在 キヤノンFA商品カタログ
No.201912-001
Page2
01-02_入稿.pdf
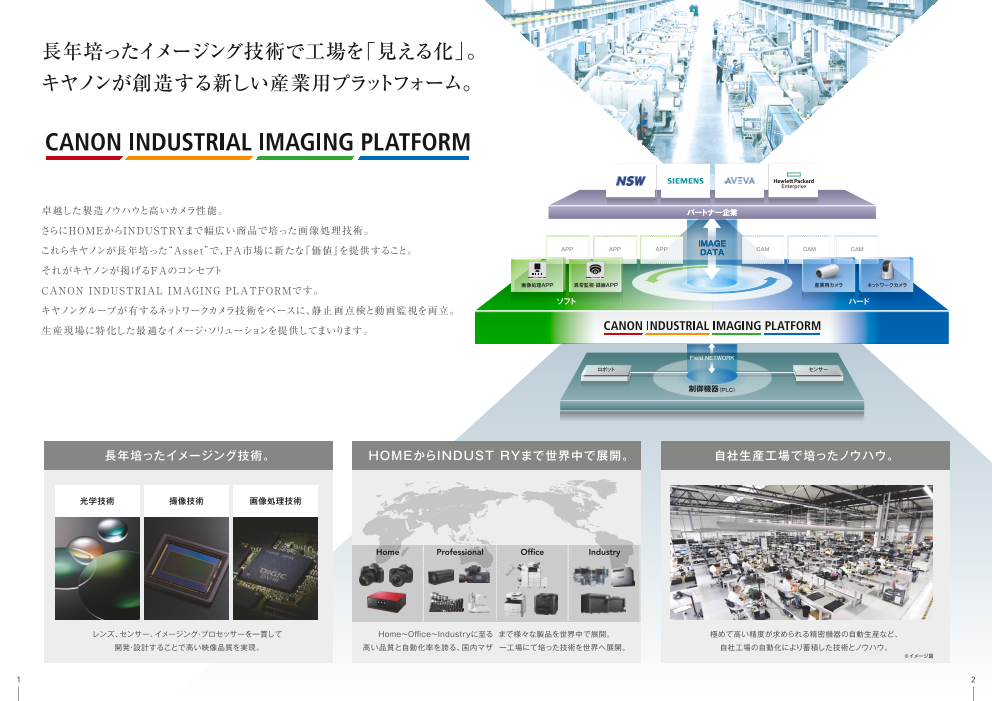
長年培ったイメージング技術で工場を「見える化」。
キヤノンが創造する新しい産業用プラットフォーム。
卓越した製造ノウハウと高いカメラ性能。 パートナー企業
さらにHOMEからINDUSTRYまで幅広い商品で培った画像処理技術。
IMAGE
これらキヤノンが長年培った“Asset”で、FA市場に新たな『価値』を提供すること。 APP APP APP DATA CAM CAM CAM
それがキヤノンが掲げるFAのコンセプト
画像処理APP 異常監視・録画APP 産業用カメラ ネットワークカメラ
CANON INDUSTRIAL IMAGING PLATFORMです。
ソフト ハード
キヤノングループが有するネットワークカメラ技術をベースに、静止画点検と動画監視を両立。
生産現場に特化した最適なイメージ・ソリューションを提供してまいります。
Field NETWORK
ロボット センサー
制御機器(PLC)
長年培ったイメージング技術。 HOMEからINDUST RYまで世界中で展開。 自社生産工場で培ったノウハウ。
光学技術 撮像技術 画像処理技術
Home Professional Office Industry
レンズ、センサー、イメージング・プロセッサーを一貫して Home~Office~Industryに至る まで様々な製品を世界中で展開。 極めて高い精度が求められる精密機器の自動生産など、
開発・設計することで高い映像品質を実現。 高い品質と自動化率を誇る、国内マザ ー工場にて培った技術を世界へ展開。 自社工場の自動化により蓄積した技術とノウハウ。
※イメージ図
1 2
Page3
03-04_入稿.pdf
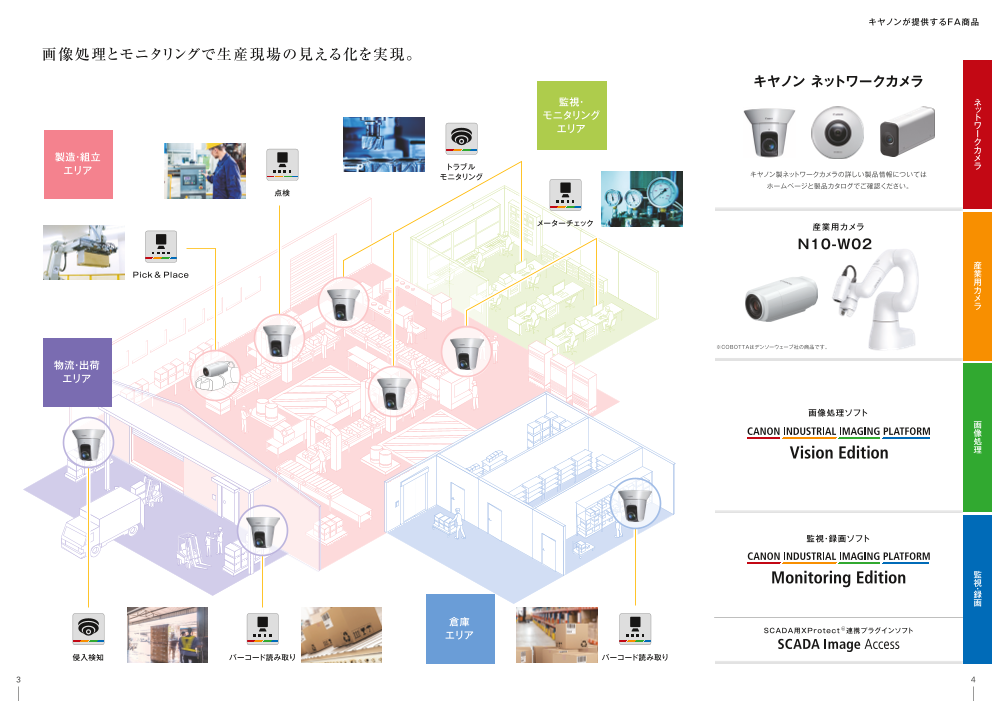
キヤノンが提供するFA商品
画像処理とモニタリングで生産現場の見える化を実現。
キヤノン ネットワークカメラ
監視・ ネ
モニタリング ット
エリア ワー
ク
カ
製造・組立 メ
エリア トラブル ラ
モニタリング キヤノン製ネットワークカメラの詳しい製品情報については
ホームページと製品カタログでご確認ください。
点検
メーターチェック 産業用カメラ
N10-W02
産
Pick & Place 業
用
カ
メ
ラ
※COBOTTAはデンソーウェーブ社の商品です。
物流・出荷
エリア
画像処理ソフト
画
像
処
理
監視・録画ソフト
監
・視録
画
倉庫
エリア SCADA用XProtect 連携プラグインソフト
侵入検知 バーコード読み取り バーコード読み取り
3 4
Page6
09-10_入稿用.pdf
コンセプト 商品構成
ネットワークカメラを活用した画像処理ソフト
ニーズに合わせて選べる3モデル
ネ
ッ
ト
1 標準モデル : Vision Edition ワー
協働ロボットに新たな「目」を提供 クカ
Vision Editionはキヤノン製ネットワークカメラや産業用 メ
カメラN10-W02を利用した画像処理ソフトウェアです。 ラ
画像処理コントローラー
また、DENSO WAVE社製COBOTTAを稼働させるプログ
ラミングソフトウェアとしても使用できます。ネットワーク
カメラのPTZ*機能を活用して広範囲の画像処理を行う
ことが可能となり、かつ画像処理の結果に応じてCOBOTTA ※標準モデルは専用のIPCにインストールした
を動作させるといった画像処理とCOBOTTAの連動を 画像処理コントローラーとして販売しております。
一つのソフトウェア上で行うことができます。
産
業
用
2 COBOTTA内蔵モデル : Vision Edition-C カメ
ラ
Vision Edition-Cはキヤノンの画像処理ソフトVision
Edit ionをCOBOTTAの中にインストールできるように
したCOBOTTA専用モデルです。Vision Edition-Cの
高度な画像処理によりCOBOTTAの可能性を拡大します。
また、COBOTTAの中にインストールされるため、省スペース
でご利用いただけます。
画
像
処
3 URモデル : Vision Edition-U 理
Vision Edition-Uは画像処理ソフトVision Editionと
ユニバーサルロボット(UR)社製のロボットとの通信を
可能にしたURロボット専用モデルです。
※URモデルは専用のIPCにインストールした
ネットワークカメラのPTZ機能を活用して広範囲に対して 画像処理コントローラーとして販売しております。
画像処理を行い、その結果をURロボットに与えることが
できます。
監
・視録
モデル別違い早見表 画像処理 IPC PLC通信 FTP通信 ロボット制御 データベース 画通信
❶標準モデル
❷COBOTTA内蔵モデル
❸URモデル
*PTZ…パン(P):カメラの画角を水平方向に移動(横方法に首振り)させる制御、チルト(T):カメラの画角を垂直方法に移動(縦方向に首振り)させる制御、
9 ズーム(Z):画角を拡大(ズームアップ)及び縮小 (ズームアウト)して表示させる制御の略。 10
Page7
11-12_入稿.pdf
主な特長 標準モデル COBOTTA内蔵モデル URモデル
1 2 3 3モデル 共通の特長
使用例
ネ
ネットワークカメラ1台で複数個所の画像処理が可能。 様々な方法での正誤判定を自動化 ット
ワ
従 来 Vision Editionなら 従 来 ーク
カ
検査ポイントごとにカメラが必要。 PTZ機能により1台で複数個所の検査が可能。 専用機を用いる場合、検査内容や検査方法に メ
応じて異なる専用機が必要。 ラカラー判定
Vision Editionなら
OK 形状マッチング NG
Vision Editionは色判別ユニット、形状マッチ 判定
ングユニット、文字認識ユニットなど多くの
ユニットを搭載。ワークや印字されたロゴなど
の有り無しを判定する際に、状況に応じて、 OCR判定
様々な方法で判定することが可能です。
産
業
用
カ
アナログメーター読み取りによる点検作業の自動化 メラ
用途に応じて選べる豊富な画像処理を搭載。 従 来
従 来 Vision Editionなら 従来は人が点検作業として見回っていたり、
アナログメーター一つに対してカメラ1台付
Pick & Placeに使用する マッチング機能に加え、エッジ検出やブロブ検出等の検査系機能から ける必要がありました。
パターンマッチング機能のみ。 バーコードやQRコード読み取りといった点検系機能まで幅広く搭載。
Vision Editionなら
0 2
1
モデル 5 カメラにPTZ機能が搭載されているので、
4
7 1 6
一台のカメラでアナログメーターを複数読 画
エッジ検出 ブロブ検出 エリア検出 円検出 み取ることができます。 像
処
理
1Dコードリーダー 2Dコードリーダー アナログメーター 数字認識
読み取り バーコード複数読み取りで着荷検収を自動化
濃淡検査 エッジ位置 部分円環エッジ 近似直線エッジ 角度検出 楕円検出 色判別 文字認識
従 来 Vision Editionなら
フローチャート形式で簡単設定。 ヒトの手で一つ一つ読み取る作業は バーコードの貼付位置を検出し、自動でその位置までPTZ※。
効率が悪く、人的ミスが起こる可能性が 複数のバーコードを順番に読み取り、バーコード値を出力できます。
従 来 あります。
監
PLCプログラムや画像処理プログラムなど、 視スタート ・
特殊なプログラム言語の技術習得が必要で立ち上げに 画像処理ユニット 録
エッジ検出 画
時間を要する。
ロボット移動
Vision Editionなら ロボット操作ユニット エンド
フローチャートにユニットパーツを並べていくだけの
簡単設定で、各種プログラミングなしに画像処理が可能。
※バーコードの自動検出&複数読み取り機能はキヤノン製PTZ搭載のネットワークカメラに限ります。AXIS製は対応しておりません。
11 12
Page8
13-14_入稿.pdf
主な特長 標準モデル COBOTTA内蔵モデル URモデル 標準モデル COBOTTA内蔵モデル URモデル 主な特長
1 標準モデル 2 COBOTTA内蔵モデルの特長 3 URモデルの特長
ネ
ッ
フローチャートでCOBOTTAを動作させることが可能。 Vision Edition-Uは画像処理だけを担当。 トワ
ー
ユニットパーツを並べていくだけの簡単操作でCOBOTTAを制御可能。 ク
特殊なプログラミング言語の技術取得が不要で、誰でも簡単にPick & Placeを始めることができます。 カ
ロボットプログラム 画像処理 メラ
ユニットパーツを並べていくだけで、 URCap※
ロボット操作や画像処理を直感的に実施可能。
移動 - 001 演算 - 006
原点移動 Robot_X補正量変換 画像処理指示
演算 - 008
ハンド - 002 演算 - 007 Robot_Rz補正量変換
ワークアンチェック Robot_Y補正量変換
移動 - 009
移動 - 003
ランダムピック上空 補正移動
画像処理結果
撮像 - 004 移動 - 010
撮像(ワーク位置) ワーク位置へ下降
形状 - 005 UR Teach Pendant
ランダムワーク検出 産
業
用
※イメージ図 カ
※ご利用の際は専用のURCapをTeach Pendantにインストールする必要があります。URCapはキヤノンのWEBサイトからダウンロードいただけます。 メラ
COBOTTAのカメラを使った画像処理が可能。 使用イメージ
COBOTTA専用のオンハンドカメラN10-W02でも、ネットワークカメラと同じ画像処理が可能。 次工程へ運搬 重量の確認
g 個数の確認
1Dコード
アナログメーター Pick & Place
読み取り
画
像
2Dコード 処理
デジタルメーター
読み取り
URロボットで開けた穴の有無や取り付けた部品の有無などを画像処理で URロボットでトレーに配列した部品の個数を確認したり、重量計のデジタル
確認できます。自動車などの大きなワークに対してPTZ*機能が効果を発 数値を読み取ることで重量確認もできます。1台のカメラで複数の異なる
揮します。 画像処理ができます。
画像処理とCOBOTTA動作を一つのソフトウェアで実行。 1 棚の在庫状況を確認
画像処理結果に基づいてCOBOTTAを動作させるといった 1 成形機の稼働状況確認
カメラとロボットの連動も難なくこなします。 ネットワークカメラ OK
*対応ネットワークカメラは、P.18のシステム構成図をご確認ください。
連動 監
視・録
画像処理 画
2 不足している対象物を
箱から取り出し陳列 2 成形品やトレーのチェック
画像処理で商品棚の在庫状況を確認し、不足している商品をURロボットで 画像処理で射出成形機のモニターの表示内容を読み取り、結果をURロボット
補充します。URロボットと画像処理でマテリアルハンドリングを実現します。 に返すことで、URロボットは成形機の稼働状況に応じた動作ができます。
また配列した部品の確認も可能です。
13 14
Page9
15-16_入稿.pdf
システム構成/仕様 標準モデル COBOTTA内蔵モデル URモデル
標準モデル システム構成図 対応PC
Vision Editionは下記いずれかのPCにインストールしたものを販売させていただきます。お好きなPCをお選びください。
対応 ネットワークカメラ( 2019年12月現在)
メーカー PC OS
ネ
ッ
ト
シーメンス SIMATIC IPC427E Windows 10 IoT Enterprise 2016 LTSB ワ
VB-S30VE VB-R13VE VB-R13 VB-S30D Mk II VB-H45 VB-S910F N10-W02 (64bit) ー
ク
カ
メ
ラ
AXIS AXIS AXIS AXIS AXIS AXIS AXIS
P1214 P1224-E M1065-LW V5915 M5065 P3905-R Mk II P3915-R Mk II
HPE Edgeline GL20
N10-W02
産業用カメラ
PoEハブ
FTPサーバー
産
業
Windows 10 Pro (64bit) 用
Windows Server 2016 Standard カ
デンソーウェーブ社製 Hewlett Packard (64bit) メ
Enterprise HPE Edgeline EL300データベース Windows Server 2012 R2 Standard ラPLC 各種FA機器
サーバー 画像処理コントローラー (64bit)
※いずれかを選択してください
型名 Vision Edition
対応カメラ メーカー カメラ タイプ 光学ズーム パン・チルト 解像度
N10-W02 ー なし なし 1920×1080
VB-S30D Mk II 屋内DOME/超小型 3.5倍 350度・90度 1920×1080
VB-S30VE 屋外DOME/超小型 3.5倍 350度・90度 1920×1080
キヤノン VB-R13VE 屋外旋回型 30倍 360度・180度 1920×1080 HPE Edgeline EL1000
VB-R13 屋内旋回型 30倍 360度・180度 1920×1080
VB-H45 屋内PTZ/スタンダード 20倍 340度・100度 1920×1080
VB-S910F 屋内BOX/超小型 3.5倍 なし 1920×1080 画
P1214 ヘッド分離/超小型 なし なし 1280×720 像
P1224-E ヘッド分離/超小型広角 なし なし 1280×720 処
M1065-LW 無線/超小型 なし なし 1920×1080 理
AXIS M5065 屋外DOME/超小型 5倍 358度・90度 1920×1080
V5915 屋内PTZ/スタンダード 30倍 340度・110度 1920×1080
P3905-R Mk II 屋外DOME/超小型 なし なし 1920×1080
P3915-R Mk II 屋外DOME/超小型 なし なし 1920×1080 Matrox Matrox 4Sight EV6 Windows 10 IoT Enterprise (64bit)
対応PLC SLMP通信(QnA互換3E方式)対応のPLC(三菱電機社製など)
Open User Communication通信対応のPLC(シーメンス社製)
オムロン社製CS/CJシリーズ(FINS通信)
対応データベース Microsoft SQL Server、PosgreSQL、ORACLE Database
対応ロボット COBOTTA(Ethernetによるb-CAP通信対応)
カメラ同時接続台数 1フローチャートあたり最大4台
三菱電機 MELIPC MI2000 Windows 10 IoT Enterprise 2016 LTSB
カメラユニット 撮像、ネットワークカメラポジション、ネットワークカメラ移動先補正、グリッドPTZ (64bit) 監
分岐処理ユニット 分岐処理、複数条件分岐 ・視
画像処理ユニット 濃淡検査、エリア、エッジ位置、エッジ幅、部分円環エッジ、近似直線エッジ、角度検出、円検出、楕円検出、ブロブ検出、 録
1Dコードリーダー、2Dコードリーダー、数字認識、文字認識、アナログメーター読み取り、色判別、円環文字認識、7セグ数字認識 画
モデルマッチングユニット NCCマッチング、形状マッチング
ロボット操作ユニット ロボット移動、ロボット移動先補正、カメラ座標変換、ロボット‐カメラキャリブレーション、
ロボットパレタイズ、ロボットハンド、ロボットI/O
演算ユニット 四則演算、角度演算、複数条件分岐演算、最大値/最小値、数式演算、出力値統計、2直線の交点、2点間の計算
※ COBOTTAはデンソーウェーブ社の商品です。
15 ※ 商品の仕様は予告なく変更になる場合があります。最新情報は、裏表紙に記載のキヤノンのホームページでご確認ください。 16
Page10
17-18_入稿.pdf
システム構成/仕様 標準モデル COBOTTA内蔵モデル URモデル 標準モデル COBOTTA内蔵モデル URモデル システム構成/仕様
COBOTTA内蔵モデル システム構成図 URモデル システム構成図
対応 ネットワークカメラ( 2019年12月現在) 対応 ネットワークカメラ( 2019年12月現在)
ネ
ッ
ト
ワ
VB-S30VE VB-R13VE VB-R13 VB-S30D Mk II VB-H45 VB-S910F N10-W02 VB-S30VE VB-R13VE VB-R13 VB-S30D Mk II VB-H45 VB-S910F N10-W02 ー
ク
カ
メ
ラ
AXIS AXIS AXIS AXIS AXIS AXIS AXIS AXIS AXIS AXIS AXIS AXIS AXIS AXIS
P1214 P1224-E M1065-LW V5915 M5065 P3905-R Mk II P3915-R Mk II P1214 P1224-E M1065-LW V5915 M5065 P3905-R Mk II P3915-R Mk II
画像処理ソフト内蔵
PoEハブ PoEハブ
各種FA機器 PLC 産
画像処理コントローラー 業用
カ
メ
デンソーウェーブ社製 ユニバーサルロボット社製 ラ
FTPサーバー FTPサーバー データベース
サーバー
型名 Vision Edition-C 型名 Vision Edition-U
対応カメラ メーカー カメラ タイプ 光学ズーム パン・チルト 解像度 対応カメラ メーカー カメラ タイプ 光学ズーム パン・チルト 解像度
N10-W02 ー なし なし 1920×1080 N10-W02 ー なし なし 1920×1080
VB-S30D Mk II 屋内DOME/超小型 3.5倍 350度・90度 1920×1080 VB-S30D Mk II 屋内DOME/超小型 3.5倍 350度・90度 1920×1080
VB-S30VE 屋外DOME/超小型 3.5倍 350度・90度 1920×1080 VB-S30VE 屋外DOME/超小型 3.5倍 350度・90度 1920×1080
キヤノン VB-R13VE 屋外旋回型 30倍 360度・180度 1920×1080 キヤノン VB-R13VE 屋外旋回型 30倍 360度・180度 1920×1080
VB-R13 屋内旋回型 30倍 360度・180度 1920×1080 VB-R13 屋内旋回型 30倍 360度・180度 1920×1080
VB-H45 屋内PTZ/スタンダード 20倍 340度・100度 1920×1080 VB-H45 屋内PTZ/スタンダード 20倍 340度・100度 1920×1080 画
VB-S910F 屋内BOX/超小型 3.5倍 なし 1920×1080 VB-S910F 屋内BOX/超小型 3.5倍 なし 1920×1080 像
P1214 ヘッド分離/超小型 なし なし 1280×720 P1214 ヘッド分離/超小型 なし なし 1280×720 処
P1224-E ヘッド分離/超小型広角 なし なし 1280×720 P1224-E ヘッド分離/超小型広角 なし なし 1280×720 理
M1065-LW 無線/超小型 なし なし 1920×1080 M1065-LW 無線/超小型 なし なし 1920×1080
AXIS M5065 屋外DOME/超小型 5倍 358度・90度 1920×1080 AXIS M5065 屋外DOME/超小型 5倍 358度・90度 1920×1080
V5915 屋内PTZ/スタンダード 30倍 340度・110度 1920×1080 V5915 屋内PTZ/スタンダード 30倍 340度・110度 1920×1080
P3905-R Mk II 屋外DOME/超小型 なし なし 1920×1080 P3905-R Mk II 屋外DOME/超小型 なし なし 1920×1080
P3915-R Mk II 屋外DOME/超小型 なし なし 1920×1080 P3915-R Mk II 屋外DOME/超小型 なし なし 1920×1080
対応PLC SLMP通信(QnA互換3E方式)対応のPLC(三菱電機社製など) 対応IPC SIMATIC IPC427E (シーメンス社製)
Open User Communication通信対応のPLC(シーメンス社製) HPE Edgeline GL20 (HPE社製)
対応ロボット COBOTTA 対応データベース Microsoft SQL Server、PosgreSQL、ORACLE Database
カメラ同時接続台数 1フローチャートあたり最大4台 対応ロボット UR3/UR5/UR10(PolyScope 3.11.0)
UR3e/UR5e/UR10e(PolyScope 5.3.1*) *2019年12月現在の対応バージョンです。
カメラユニット 撮像、ネットワークカメラポジション、ネットワークカメラ移動先補正、グリッドPTZ
カメラ同時接続台数 1フローチャートあたり最大4台
分岐処理ユニット 分岐処理、複数条件分岐 監
カメラユニット 撮像、ネットワークカメラポジション、ネットワークカメラ移動先補正、グリッドPTZ 視
画像処理ユニット 濃淡検査、エリア、エッジ位置、エッジ幅、部分円環エッジ、近似直線エッジ、角度検出、円検出、楕円検出、 録・
ブロブ検出、1Dコードリーダー、2Dコードリーダー、数字認識、文字認識、アナログメーター読み取り、色判別 分岐処理ユニット 分岐処理、複数条件分岐 画
モデルマッチングユニット NCCマッチング、形状マッチング 画像処理ユニット 濃淡検査、エリア、エッジ位置、エッジ幅、部分円環エッジ、近似直線エッジ、角度検出、円検出、楕円検出、ブロブ検出、
1Dコードリーダー、2Dコードリーダー、数字認識、文字認識、アナログメーター読み取り、色判別、円環文字認識、7セグ数字認識
ロボット操作ユニット ロボット移動、ロボット移動先補正、ロボットパレタイズ、ロボットハンド、ロボットI/O、ロボットプログラム
モデルマッチングユニット NCCマッチング、形状マッチング
演算ユニット 四則演算、角度演算、複数条件分岐演算、最大値/最小値、数式演算、出力値統計、
2直線の交点、2点間の計算 演算ユニット 四則演算、角度演算、複数条件分岐演算、最大値/最小値、数式演算、出力値統計、
2直線の交点、2点間の計算
※ COBOTTAはデンソーウェーブ社の商品です。
※ 商品の仕様は予告なく変更になる場合があります。 ※仕様は予告なく変更になる場合があります。
17 ※Vision EditionはIPCにインストールした状態で販売させていただきます。 18
Page14
25-26_入稿.pdf
ネ
ッ
ト
ワ
ー
ク
カ
メ
ラ
産
業
用
カ
メ
ラ
画
像
処
理
監
視・録
画
25 26