



クールマッスルは、省スペース、省配線、コスト削減に貢献します。ひとつ先のモーションコントロールを体感してください。
◆一体型ACサーボシステム
クールマッスルはドライバ・コントローラ・エンコーダ一体型ACサーボシステムです。モータの後ろには磁気ポジションセンサと32ビットのRISCCPUを搭載したインテリジェントドライバ基板が内蔵されており驚異的なコンパクト化に成功しました。
◆オールインワンソリューション
インテリジェントドライバ
コントローラ
高分解能磁気エンコーダ
◆詳細は、カタログをダウンロードしてご覧ください。
◆不明点があればお電話にてお気軽にご質問ください。
関連メディア
このカタログについて
| ドキュメント名 | 一体型ACサーボシステム クールマッスル1 モータ・エンコーダ・ドライバ・コントローラ内蔵 |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 2.9Mb |
| 登録カテゴリ | |
| 取り扱い企業 | マッスル株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page2
Do you need help?
ス
ス
ス ース
....
Maintenance
Man-hour
Cost
Space
Bad environment
Noise
Complex programming
Design
Development cost ....
There are various problems in the site.
1
Page3
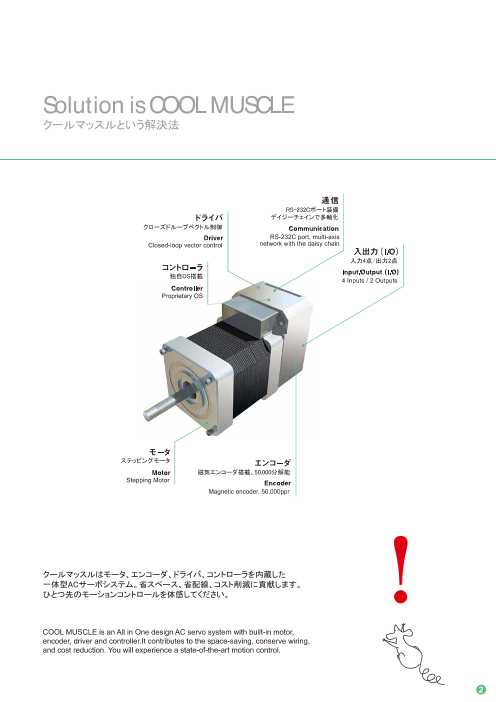
Solution is COOL MUSCLE
クールマッスルという解決法
ー
ー
ク ー ルー ク ル
RS-232C port, multi-axis
Closed-loop vector control network with the daisy chain
4 / 2
4 Inputs / 2 Outputs
Proprietary OS
ス ッ ー
ー 解
Stepping Mot o1r
Magnetic encoder, 50,000ppr
クールマッスル ー ー ー
AC ー ス ス ース ス
と ー ール い
COOL MUSCLE is an All in One design AC servo system with built-in motor,
encoder, driver and controller.It contributes to the space-saving, conserve wiring,
and cost reduction. You will experience a state-of-the-art motion control.
2
Page4
Concept クールマッスル コンセプト
一体型ACサーボシステム Integrated AC Servo System
クールマッスル ー ー AC ー COOL MUSCLE is the integrated AC servo system
ス ー と32 ッ RISC combining a drive,controller and encoder.
COOL MUSCLE realized its compactification by
CPU
embedded magnetic encoder and intelligent
ク driver with 32-bit RISC CPU on the back of motor.
ー ーシ All in One Solution
*Driver
ー
*Controller
ー
*Encoder
COOL MUSCLE is an all in one solution
for your motion control needs.
Integrated Driver
An intelligent driver mounted on the back of motor
テ eliminates an external driver box.
Also the intelligent driver allows only necessary
current drawn to produce its torque by its power
management functionality.That restricts motor’s
temperature raise and power consumption.
Integrated Controller
Based upon a 32-bit RISC CPU, the integrated
ー controller offers a wide range of hardware and
software features. Motion programs can be stored
32 CPU within the motor, eliminating the need for driver and
controller boxes. An added feature of networking
capabilities allows communication between motors
increasing efficiencies and capabilities whiles
decreasing the need for additional hardware.
ー High Resolution Magnetic Encoder
50,000 COOL MUSCLE’s high resolution magnetic encoder
AC realizes the 50,000 resolution perrotation.It allows a
very smooth motion at low speed by its own drive
method,the same as AC Servo Drive and also the
3 closed-loop control eliminates mis-steps.
Page5
All in One Solution
い ル ス COOL MUSCLE allows you to save space, to
と ス ース ス reduce wiring and cost, also to shorten
development time.
ス Conventional system
A typical conventional slider system requires a
driver, controller, origin sensor, limit sensor
and so on, making the entire system bulky and
complicated.
Very hard to differentiate your product
Bulk wiring
Bulky and complicated system
High cost
Need development and maintenance time
クールマッスル ス COOL MUSCLE system
COOL MUSCLE eliminates the need for an
external driver box, controller and sensors
making your system compact and simple.
Leave your competition behind
with COOL MUSCLE!
Wiring reduction
Compact and simple system
Cost reduction
ク ル Shorten development and maintenance time
4
Page6
Types クールマッスル プ
COOL MUSCLE supports three different
interfaces; C type for Computer, P type for
Pulse control and V type for Analog control.
Choose a system that best fits for your needs.
C 3 < C type >
C type is the most functionable COOL MUSCLE
PLC among three choices. A repetitive motion can be
executed from PC or PLC by pre-programming it.
An arbitrary motion can be executed by sending
commands from PC or PLC anytime required.
Programs and arbitrary motions can be combined
and also an affordable multiple motor control can
be realized by a daisy chain network.
1. 1. Pre-program
An external controller can be eliminated by
PLC pre-programming repetitive motions and store
them in the motor. The stored programs can be
executed by switches,PC or PLC.
Pre-programmed slider system using a C type
COOL MUSCLE system
2. ク マ 2. Direct Command
If your application requires complex or arbitrary
motion, you can send commands directly to the
COOL MUSCLE via PC or embedded computer.
A slider system with COOL MUSCLE controlled
by direct command via PC
3. ッ ーク 3. Network
C The development of more simple and affordable
multiple motor application by using multiple C type
COOL MUSCLE in a daisy chain network.
X-Y system using C type COOL MUSCLE in a
daisy chain network system
XY
5
Page7
P < P type >
Replacing your current pulse driven system with
P type COOL MUSCLE system will save space
and remove problems associated with an open
loop stepper. P type COOL MUSCLE system
supports both CW/CCW and Pulse/Direction.
P P type COOL MUSCLE usage example
V (0 +5V) < V type >
V type COOL MUSCLE can vary speeds or
positions in proportion to voltage input level.
Set maximum speed or travel distance with
ease by selecting the parameters making it an
ideal solution for constant feed systems, and
valve applications.
Slider system with V type COOL MUSCLE
V controlled by a joy stick
Cool Muscle Type selection?
for a repetitive motion system
to perfom complicated motion from
PC or dedicated controller
to run a multi-axis machine
to replace in pulse driver system
to improve machine performance
to remove problems associated with
an open loop stepper
to save space and reduce cost
to control speed or position with
an analog input
to save space and reduce cost
a simple solution
6
Page8
Features クールマッスル
COOL MUSCLE is packed with features that
help you to reduce the size and cost, and
also shortening development time of your
machines.
01 シ
32 RISC CPU 01. Simple and Compact
An intelligent driver with a 32 bit RISC CPU,
Magnetic encoder, and motor are all built in right
on the motor.
No more driver boxes
Space saving
ALL IN ONE Reduce wiring
Shorten development time
Motor Encoder
Driver Controller
02. Full Closed Loop System
COOL MUSCLE is a full closed loop system.
The high resolution magnetic encoder and the
02 ー システム intelligent driver board mounted on the back constantly monitors its position and eliminates
any miss-step.
COOL MUSCLE's power management allows
only the optimum current based on load drawn
and keeps the motor cool.
In addition, COOL MUSCLE generates high
torque at low speed by a stepping motor feature.
Higher repeatability, stability, and accuracy.
Longer motor life
Increased power efficiency
Reduced need for gear boxes
ー ー Closed Loop
ー ー
コント ー
セット ント Controller
Input Error
ー ック
By receiving position input from Open Loop SystemFeedback
the sensor COOL MUSCLE Not knowing its position, often
know its position and can Target Position resulting in problems such as
correct itself. miss-steps and targets.
7
Page9
03 03. Smooth and Accurate Movements
The COOL MUSCLE’s high resolution encoder
realizes 50,000 resolution per rotation.The vector
loop control enables a smooth motion at low speed
and it helps reducing the noise in your machinery.
AC Provide the same level of performance as
AC Servo motor at an affordable pricing
Not affected across the ages
クトル
Speed and Direction Vector
Position 1 Vector Drive Control
Vector Drive is a servo motor control technique that is
different from micro-stepping control and produces
smooth movements.
Position 2
04 ー 04. User Definable Parameters
Set the parameters of your COOL MUSCLE to
PID 40 suit your needs. COOL MUSCLE gives you over
CML 40 parameters. The parameters can easily be set
by using CML.
Flexibly change your motor characteristic
Easy Parameter Setting Example
K46.1=1
Baseline position is automatically set upon motor
initialization using the mechanical stopper.
K28.1=7000 4
Set Origin Search to Input4
K34.1=21 2 1
Set Alarm to Output2, Inposition to Output1
K60.1=50 50
Set the torque to 50% in Push Mode
ットセン セン コスト No more the Origin / Limit Sensor, saved the cost
Software Origin Search
COOL MUSCLE can complete an origin search by
pushing a mechanical stopper until it reaches specified
current level.Then an origin sensor can be eliminated.
CW / CCW Software Limit
Software Limits can be set at the both CW/CCW
sides by parameters. It eliminates the need for limit
sensors.
8
Page10
Features クールマッスル
05 CML 05. Easy Programming Language
CML COOL MUSCLE Language クールマッスル CML( COOL MUSCLE Language) is a programming
CML ス ー マ と language designed for COOL MUSCLE. Programs
クール ークス ー ー ル can be easily created by ASC commands on the
と free software COOLWORKS LITE or any standard
terminal program.
Easy programming
Shorten development time
ー Available the free open software
06
06. Easy to Use
[ クト ー ]
RS-232C いCML マ ー と <Direct Mode>
COOL MUSCLE can be directly operated by
just entering the CML commands via RS-232C
communication.
ク ー Direct mode example
ク
S.1 = 250 速度設定 Direct operation
Set speed by PC <Program Mode> (C type only)
A.1 = 100 加速度設定 Programs can be downloaded to COOL MUSCLE
Set acceleration so that various motions can be executed by PC
P.1 = 10000 目標位置設定 or simple switches. Programmable Max.500
Set target position steps.
^ .1 実行
Execute
Great solution for repetitive motion
Possible to design more simple and
プ ー compact machines
クールマッスル ー ー と
ス ッ
ス ッ
1. Define motion
P1.1 = 1000
S A
P2.1 = 3000
P マ- T
P3.1 = -1000
S1.1 = 100
S2.1 = 300 Speed(S), acceleration(A),
A1.1 = 50 position(P) and timer(T)are the motion definition.
T1.1 = 100
2. Program ス ッ
B1.1 Execute programs
A1.1 , S1.1 , P1.1 by switches
A1.1 , S2.1 , P2.1 マ-
T1.1
S1.1 , P3.1 Define motion programs using
the motion profiles defined above.
9
Page11
07 07. Assignment I/O
Configure and assign multiple functions to I/Os
on COOL MUSCLE. COOL MUSCLE comes
/ / / ( ) standard with 4 Inputs and 2 outputs that can be
used either digital, analog I/O, serial or pulse
counters (input only). COOL MUSCLE allows you
to assign a function to each signal point.
Multiple functions can be assigned to each I/O
ports.
User flexible applications of these powerfully
built in features
Input Function Example
Origin search
Origin sensor
Manual jog
Execute Bank1
Motor free
Enable motor
Execute next step
Execute previous step
Output Function Example
Alarm
In-position
Analog output for monitoring
08 ー 08. Virtual Input Signal
I/O ports can be used more efficiently by using
2 a unique virtual signal technique. COOL MUSCLE
creates the 2nd signal after the set time interval
1 from an original signal. Multiple functions can be
assigned to an input by the virtual signal
technique that can be set by parameters.
I/O Eliminates the external I/O board
Cost reduction
Real Signal
Target Voltage Level
Rising Edge
Quick Response Signal Falling Edge
Stop
Target Voltage Level
Falling Edge
Slow Response Signal Rising Edge Motor free
Motor enable
Time delay
10
Page12
Features クールマッスル
09 (C 09. Push Motion (C type only)
Push Motion can be activated for a given time at a
given current level which realizes to push a rod to
a work just as a typical pneumatic cylinder.
Speed
S3
A1 A1
S1
P1 P2
0
Time
Torque
Torque limit set by Parameter
ルク ー
Pushing
0
Time
Time duration set by Parameter
ー
Push Motion
10. Advanced Motion
10 COOL MUSCLE supports standard PTP motion サ ー control, as well as wide variety of custom
programmed movement. Speed or acceleration
PTP can be changed real-time during the motion.
COOL MUSCLE supports advanced functions
such as continuous PTP motion (Merge Motion)
PTP with different acceleration and deceleration.
PTP Standard PTP
Speed
S2
A1 A1
S1 A1 A1 A1 A1 P3
P1 P2
T1 T1 Time
マー Merge Motion
Speed
S3
A2 A2
S2
A1
P3
S1
A1 P2
P1
Time
PTP PTP with different acceleration and deceleration
Speed
S1
A1 A2
P1 P2
Time
11
Page13
11 ー 11. Network
COOL MUSCLE system provides a low cost
networking solution. Multiple COOL MUSCLEs
D- can easily be daisy chained by adding network cards. Standard D-sub 9 pin cable can be used
SUB for network cables that provides a cost reduction.
CML
Visual Basic C++
Simple and low cost network solutions
15 Available the Multi-axis control up to 15 axes
ー ッ ーク Daisy Chain Network
PC or PLC
マス ー ー ス ー ー ス ー ー
Master Motor Slave Motor Slave Motor
12 ー 12. Gain Tuning
PID COOL MUSCLE systems can be tuned with three
simple parameters.
PID Simple tuning solution
Shorten mechanical development time
Positioning
P
+ Torque
Positioning PComImand 1DVelocity PositionCommand I x Integral Integral Output- InertiaD Position Loop
Position Feed Back
Simple
12
Page14
Software ト
ー ー ス COOLWORKS LITE
COOLWORKS LITE クール ークス と クールマッスル
ー クールマッスル い
ス う
ー とい
クールマッスル い
マッスル ー ー ー いい
www.musclecorp.com
COOLWORKS LITE is our free open software for COOL MUSCLE
motors for ease of use and to shorten development time. ー ー
COOLWORKS LITE includes all the basic function that are required
for parameter setting, program creation, jogging and status MotorData / Information
monitoring. Confirmation of the speed data
COOLWORKS LITE is available for free at the MUSCLE's web site. and parameters
www.musclecorp.com
ム
クール ークス ProgramExecution
FunctionalDescr Execution / Pause of program, etc.iption
ー
クールマッスル
Sent Data
Display data sent to Cool Muscle
ー
クールマッスル
Motor Response
Display the data received from Cool Muscle
CML
ー マ ー
CMLEditor
Edit and send
マ Parameters and commands
Command Line
Enter commands in a single line and send
ー
Set the parameter
Draw the graph
ーシ
Calculate the motion
13
Page15
Accessories クセ /
C A B L E
ー ー ル Motor Cable RS232C ー ル RS232C Cable スト ート ー ル Straight Cable
CM1C1-400S (400mm) CM1C2-2000A (2000mm) CM1DC1-SSC-1800 (1800mm)
ー ル ル ー ー ル D-SUB9 ル ー ル ー
Standard Motor Cable. ー ッ ーク ー
RS232C Cable is required to connect Cool Muscle Straight Cable is required for daisy chain
to a serial port of PC. You would need it for various networking using an interface card.
of setting.
NETWORK CARD POWER SUPPLY EtherCAT
CM1DC1-MBSC CM1DC1-SBSC CM1DC1-CASE CMPS-XMUS-150 CMPS-XMUS-240 EtherCATクールマッスル ッ
ス ー EtherCAT COOL MUSCLE Bridgeス ー ース 150W/6A 240W/10A
Master Card Set Slave Card Set Network Card Case EB01(CM1) EB12(CM1-CM2)
ー ッ ーク ー ク クールマッスル ッ ーク
1 マス ー ッ 2 ス ー ッ い クールマッスル ッ
い い ー ル ー ル ー ル
ス ー ー ル
Designed specifically for Cool Muscle, EtherCAT COOL MUSCLE Bridge that adapts /
Daisy chain Cool Muscle systems using Network cards. our power supply is built to withstand connects COOL MUSCLE to EtherCAT network.
*Separately Straight Cable for Network required. current draw spikes that hard stops or * Separately CM* communication cable, power cable
starts often require. and LAN cable required.
マス ー ー ス ー ー
Master Card Slave Card
Conformance tested
A C T U A T O R G E A R
サーボ ー Servo Actuator Gearbox
クールマッスル Integrated actuator with COOL と A wide range of high quality
ー ー ク MUSCLE embedded with a driver, ー い gearboxes are available to suit your
ー ー controller and encoder. It allows you application needs.
ー ス ッ ーク ス to build a low cost and very precise ック ッ ス Combine a high precision, low
と network system with Max.15-axis ー クールマッスル backlash, zero maintenance,
ー ク ー over daisy chain. Many different と durable gearbox with a Cool Muscle
い kinds of servo actuators can be ー と い to maximize performance.
easily combined to form ideal servo
systems.
14
Page16
Specifications
型 Model Name
CM1 - C - 17L 30C
ール ー
Control Type Motor Size Length Max. Speed
C… ー Computer Type 11…28 L… Long 30…3000 rpm
P… ルス Pulse Type 17…42 S… ー Short 20…2000 rpm EMC RoHS
V… Analog Type 23…56 *COOL MUSCLE is the products that meet the EMC & RoHS.
CM1- -11L / S
MODEL CM1- -11L30A CM1- -11S30A
[ ]
Motor Output [W] 18 9
Max. Speed [rpm] 3000 3000
[Kgfcm](Nm)
Rated Continuous Torque [Kgfcm] (Nm) 0.56 (0.055) 0.28 (0.027)
[Kgfcm](Nm)
Peak Torque [Kgfcm] (Nm) 0.8 (0.078) 0.4 (0.039)
[g cm 2]
Load Inertia [g cm 2 ] 180 80
18 8
[g cm 2]
Motor Inertia [g cm 2 ]
Depending on the load inertia, servo gain needs to be adjusted within the above range : adjustable by parameters
Encoder Incremental Magnetic Encoder (50,000 pulses / Rotation)
Control Method Closed Loop Vector Control
Input Supply Voltage DC24V± 10%
1.2 / 1.5 A 0.8 / 1.0 A
Input Supply Current Rated / /
( Continuous Torque / Rated Peak Torque ) ( Continuous Torque / Rated Peak Torque )
/
Resolution ( Pulse / Rotation ) From 200 to 50,000 Set by parameter
[g]
Mass [g] 300 240
/ 0 40 / -20 60
Operating/Storage Temperature 0 +40 / -20 +60 No Condensation condition)
90 RH
Environment Operating Humidity Less Than 90% RH
/ 10G / 1G
Impact / Vibration Less than 10G / Less than 1G
ー Torque Curve
CM1- -11L30A CM1- -11S30A
0.9 0.45
0.8 0.40
0.7 0.35
0.6 0.30
0.5 0.25
0.4 0.20
0.3 0.15
0.2 0.10
0.1 0.05
15 0 0500 1000 1500 2000 2500 3000 RPM 500 1000 1500 2000 2500 3000 RPM
Torque (Kgfcm)
Torque (Kgfcm)
Page17
CM1- -17L / S
MODEL CM1- -17L30C CM1- -17S30C
[ ]
Motor Output [W] 18 18
Max. Speed [rpm] 3000 3000
[Kgfcm](Nm)
Rated Continuous Torque [Kgfcm] (Nm) 3.7 (0.36) 0.84 (0.082)
[Kgfcm](Nm)
Peak Torque [Kgfcm] (Nm) 5.3 (0.518) 1.2 (0.117)
[g cm 2]
Load Inertia [g cm 2 ] 760 380
74 36
[g cm 2]
Motor Inertia [g cm 2 ]
Depending on the load inertia, servo gain needs to be adjusted within the above range : adjustable by parameters
Encoder Incremental Magnetic Encoder (50,000 pulses / Rotation)
Control Method Closed Loop Vector Control
Input Supply Voltage DC24V± 10%
1.5 / 1.8 A 0.8 / 1.0 A
Input Supply Current Rated / /
( Continuous Torque / Rated Peak Torque ) ( Continuous Torque / Rated Peak Torque )
/
Resolution ( Pulse / Rotation ) From 200 to 50,000 Set by parameter
[g]
Mass [g] 480 330
/ 0 40 / -20 60
Operating/Storage Temperature 0 +40 / -20 +60 No Condensation condition)
90 RH
Environment Operating Humidity Less Than 90% RH
/ 10G / 1G
Impact / Vibration Less than 10G / Less than 1G
ー Torque Curve
CM1- -17L30C CM1- -17S30C
6.00 1.4
5.00 1.2
4.00 1.0
3.00 0.8
2.00 0.6
1.00 0.4
0.00 0.00
0 500 1000 1500 2000 2500 3000RPM 0 500 1000 1500 2000 2500 3000RPM
16
Torque (Kgfcm)
Torque (Kgfcm)
Page18
Specifications
CM1- -23L / S
MODEL CM1- -23L20C CM1- -23S30C
[ ]
Motor Output [W] 30 45
Max. Speed [rpm] 2000 3000
[Kgfcm](Nm)
Rated Continuous Torque [Kgfcm] (Nm) 8.9 (0.87) 3.0 (0.294)
[Kgfcm](Nm)
Peak Torque [Kgfcm] (Nm) 12.7 (1.24) 4.3 (0.42)
[g cm 2]
Load Inertia [g cm 2 ] 4600 1400
360 100
[g cm 2]
Motor Inertia [g cm 2 ]
Depending on the load inertia, servo gain needs to be adjusted within the above range : adjustable by parameters
Encoder Incremental Magnetic Encoder (50,000 pulses / Rotation)
Control Method Closed Loop Vector Control
Input Supply Voltage DC24V± 10%
2.6 / 3.4 A 3.9 / 5.1 A
Input Supply Current Rated / /
( Continuous Torque / Rated Peak Torque ) ( Continuous Torque / Rated Peak Torque )
/
Resolution ( Pulse / Rotation ) From 200 to 50,000 Set by parameter
[g]
Mass [g] 1100 550
/ 0 40 / -20 60
Operating/Storage Temperature 0 +40 / -20 +60 No Condensation condition)
90 RH
Environment Operating Humidity Less Than 90% RH
/ 10G / 1G
Impact / Vibration Less than 10G / Less than 1G
ー Torque Curve
CM1- -23L20C CM1- -23S30C
14.0 4.5
12.0 4.0
10.0 3.5
8.0 3.0
6.0 2.5
4.0 2.0
2.0 1.5
0.00 1.00
0 500 1000 1500 2000 RPM 0 500 1000 1500 2000 2500 3000RPM
17
Torque (Kgfcm)
Torque (Kgfcm)
Page19
CM1- -11L/S
Dimension (UNIT : mm)
38.6
4-M2.6
Dep 3MIN
D-cut
10±0.5
±0.2
23 ±0.2 1.5
28 ±0.3
15±0.5 18.6 19
L
Model Name L
CM1- -11L30A 85
CM1- -11S30A 71
CM1- -17L/S
Dimension (UNIT : mm)
Model Name L1 L
CM1- -17L30C 51.5 75.5
CM1- -17S30C 36.5 60.5
18
28 ±0.3
23 ±0.2
53
0
22 -0.025
5 0-0.012
4.5±0.2
53
Page20
Specifications
CM1- -23L/S
Dimension (UNIT : mm)
Model Name L1 L
CM1- -23L20C 76 100
CM1- -23S30C 42 66
Connection Example
COOL MUSCLE
Controller Connector
DC+24V IN) DC+24V1
External Power GND1 2
Supply Source
DC+24V 10mA
INPUT1+ Current Limiter10
1k
INPUT1- 8
10mA
INPUT2+ Current Limiter
9
1k
INPUT2- 3
DC+5V
INPUT3 4.7k 4707
DC+5V 470pF
DC+24V INPUT4 6 4.7k 470
470pF
*R OUTPUT1 5
6mA MAX)
*R OUTPUT2 4
6mA MAX)
DC+5V(OUT) DC+5V12
10mA MAX)
GND2 11
*R=4.7k
(DC24V
(An example of using with the power DC24V)
1-12
*Number of 1-12 is PIN No.
19