




センサーからの高品位のデータを基盤とする コグニティブ自動車
自動運転車の実現は、月探査ロケットの打ち上げのようなものです。現在では、センサーから人工知能(AI)まで、エレクトロニクス分野のサプライ・チェーンによって、自動運転車の安全性を確保できるようにするための協調体制が構築されています。
ただ、運転者、搭乗者、歩行者を確実に保護するという目的を達成するためには、より高度なハードウェア/ソフトウェアが必要になります。また、機械学習やAIの活用も重要ですが、それが有効に機能するか否かは、入力されるデータの質/品位にかかっています。生死にかかわる判断の根拠となるのは、センサーからのデータです。したがって、各種のセンサーに対応し、最も正確なデータを一貫して取得可能な高い性能と信頼性を備えるシグナル・チェーンを実現しなければなりません。
自動運転車というものは、そのような基盤の上に構築されているのでなければ、安全なものだと見なすことはできないのです。<冒頭抜粋>
==============================
このカタログは上記のような冒頭から始まり、高品位なデータの必要性を以下の3項目に分けて解説しています。
■安全性を予測するコグニティブ自動車の基盤
■多面的な意思決定と分析
■高品位のデータによる時間の短縮と生命の保護
読み応えのあるものになっているので、ぜひダウンロードの上ご一読ください。
このカタログについて
| ドキュメント名 | 運転支援から自動運転まで |
|---|---|
| ドキュメント種別 | ホワイトペーパー |
| 取り扱い企業 | アナログ・デバイセズ株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
ソート・リーダーシップ記事
Share on Twitter Facebook LinkedIn Email
運転支援から自動運転まで――
センサーからの高品位のデータを基盤とする
コグニティブ自動車
著者: Chris Jacobs
アナログ・デバイセズ、自律輸送/車両安全担当バイスプレジデント
自動運転車の実現は、月探査ロケットの打ち上げのようなも 式のレポートを作成しています。それによれば、1マイル(約
のです。現在では、センサーから人工知能(AI)まで、エレク 1.6km)当たりの自動運転モードの解除回数は以前よりも減少
トロニクス分野のサプライ・チェーンによって、自動運転車の し、システムの機能が向上していることがわかります。目標の
安全性を確保できるようにするための協調体制が構築されてい 達成に向けては、この傾向を加速させることが肝要です。
ます。ただ、運転者、搭乗者、歩行者を確実に保護するという
目的を達成するためには、より高度なハードウェア/ソフトウ 自動車のメーカーは、協調と新しい考え方を重要視して、ICベ
ェアが必要になります。また、機械学習やAIの活用も重要です ンダーと直接話し合いを行うようになりました。また、センサ
が、それが有効に機能するか否かは、入力されるデータの質/ ーのメーカーは、AIのアルゴリズム開発を担う企業と共に、セ
品位にかかっています。生死にかかわる判断の根拠となるの ンサー・フュージョンについて議論しています。ソフトウェア
は、センサーからのデータです。したがって、各種のセンサー を開発する企業も、ハードウェアを供給する企業と連携して、
に対応し、最も正確なデータを一貫して取得可能な高い性能と 両者の最も良い部分を引き出そうとしています。このように、
信頼性を備えるシグナル・チェーンを実現しなければなりませ 昔からの関係にも変化が生じてきました。最終的な設計におい
ん。自動運転車というものは、そのような基盤の上に構築され て、機能、性能、信頼性、コスト、安全性の組み合わせを最適
ているのでなければ、安全なものだと見なすことはできないの 化するために、新しいダイナミックな関係が構築されているの
です。 です。
月探査ロケットの打ち上げと同様に、安全な自動運転車を実現 自動運転モードが解除されるまでの連続走行距離
するためには、数多くの障害を乗り越えなければなりません。 12000 11154.3
最近、自動運転車に関する事故が大きなニュースになりまし
た。自動運転車やそれを取り巻く環境はあまりにも複雑で、極 10000
めて多くの変数を扱わなければなりません。しかも、安全性を
確保するためのソフトウェアやアルゴリズムには、まだあまり 8000
にも多くのバグが遍在していると主張する向きもあります。こ
うしたことが、自動運転車の導入に反対する人たちの根拠にな 6000 5204.9
っています。実際、自動車の機能安全規格であるISO 26262の適
合試験に関与したことがある人であれば、懐疑的になるのも無 4000
理はないと言えます。図1に示したのは、2017年12月~2018年
1922.8
11月に自動運転車のメーカー5社がシリコンバレーで実施した 2000 1028.3 1022.3
試験の結果です。これは、実際の走行距離と自動運転モードが
解除された回数の関係を表しています。このグラフも、その懐 0 企業A 企業B 企業C 企業D 企業E
疑的な見方を増長するものだと言えるでしょう。2019年版のデ データ・ソース:カリフォルニア州DMVが作成したレポート。
ータはまだ集計されていませんが、個々の企業のレポートは既 試験の実施期間は2017年12月~2018年11月
にウェブで公開されています。
図1. 自動運転車のメーカー上位5社による試験の結果。
しかし、既に目標は定められました。何が必須なのかというこ 2017年12月~2018年11月に28社のメーカーがカリフォルニア
とは明確です。自動運転車の実現に向けて最も重要なのは、安 州の公道で実際の車両による試験を実施し、自動運転モードを
全性の確保という課題を解決することです。カリフォルニア州 解除するまでの連続走行マイル数を計測しました。
の車両管理局(DMV)は、2018年に、自動運転車に関して非公 自動運転モードでの走行距離は計203万6296マイルで、
同モードの解除回数は14万3720回でした。
analog.com/jp
Page2
2 運転支援から自動運転まで――センサーからの高品位のデータを基盤とするコグニティブ自動車
Z
X
Y
Z
X
Y
CAN
Z
X
Y
カメラ
MEMS/IMU ACU
レーダー
超音波
Z
X
Y
Z
X
Y
図2. センシング・システムの例。ADASによる車両の知覚とナビゲーションは、様々なセンシング・モダリティによって
支えられています。各モダリティは互いに独立して機能し、運転者が状況に適応できるように警告を発します。
Z
X
Y
Z
X
Y
CAN
GPS Z
GPU Z
プロセッサ MAP
センサー・
X
Y X Y
IMU フュージョン
V2X
カメラ ACU
MEMS/IMU
レーダー
超音波
Z
LIDAR X Y
Z
X
Y
図3. より高度なセンシング・システム。安全な自動運転車を実現するには、現在の状態と状態の履歴、周辺環境の性質、
車両の状態(位置、速度、軌跡、機械的な条件)を認識するための完全にコグニティブなシステムが必要です。
エコシステム全体としては、自動運転機能を備えるタクシーや 安全性を予測するコグニティブ自動車の基盤
長距離トラックなど、急速に開発が進む分野を対象とし、完全
な自動運転車を構築/試験するための適切なモデルを追求して 自動車のインテリジェンスは、一般的に自動運転のレベルで表
います。その過程でセンサーが改良されて、先進運転支援シス されます。通常、警告システムを備える車両はL1(レベル1)
テム(ADAS:Advanced Driver Assistance System)に最先端 またはL2に相当します。それに対し、L3以上の車両は、事故を
の技術が搭載されるようになりました。その結果、高いレベル 防止するための措置を講じる機能を搭載しています。L5の車両
の自動化が急速に実現されつつあります。 からはハンドルが取り除かれ、完全に自律的に走行します。
そうしたセンサー技術の例としては、カメラ、LIDAR(Light 最初の数世代のシステムでは、まずL2の機能を実現することが
Detection and Ranging:光検出と測距)、MEMS(Micro 目標になります。その場合、各種センサーをベースとするシス
Electro Mechanical System)、IMU(Inertial Measurement テムは、それぞれ独立して動作します(図2)。そうした警告
Unit:慣性計測ユニット)、超音波、GPSなどがあります。そ システムは誤報率が高く、運転の邪魔になるためオフにされる
うしたセンサーにより、真にコグニティブな自動運転車を駆動 ケースも少なくないはずです。
するAIシステムに対して重要な入力が供給されます。 完全にコグニティブな自動運転車を実現するには、はるかに多
くのセンサーが必要になります。また、その性能と応答時間も
大幅に改善しなければなりません(図3、図4)。
Page3
3 運転支援から自動運転まで――センサーからの高品位のデータを基盤とするコグニティブ自動車
自自動動運運転転のレのベレルベル センサセーンの種サ類ーの種類
・77GH・z/79GHzのイメージング・マイクロドップラ・5 77GHz/79GH
5 完全な レーダー(4~16個)
zのイメージング・マイクロドップラ・
完全な ・長距 離レ用ーLIDダARー(2(~43~個1)6個)自動運転 ・短距・離長用距フラ離ッ用シLIュDALIRD(AR2(~4~3個6個))
4 自動運転 ・カメ・ラ短距離用フラッシュLIDAR(4~6個)・高性・能カのメIMU4 ラ・高性能のIMU
・77GHz/79GHzのレーダー(4~8個)
部分的な ・長距離用LIDAR(1個)
3 自動運転 ・短距・離7用7GフHラz/ッ79シGHュzのLIDレARー(ダ1~ー2個()4~8個)部分的な ・カメ・ラ長距離用LIDAR(1個)
3 自動運転 ・超音・波短距離用フラッシュLIDAR(1~2個)・カメラ
・77GH・z/超79G音Hz波のレーダー(1~5個)
2 ・カメラ
基本的な ・超音・波77GHz/79GHzのレーダー(1~5個)
2 ADAS ・24GH・zのカレメーラダー(2~4個)
1 基本的な ・カメ・ラ超音波
ADAS ・超音波・24GHzのレーダー(2~4個)
1 ・カメラ
・超音波
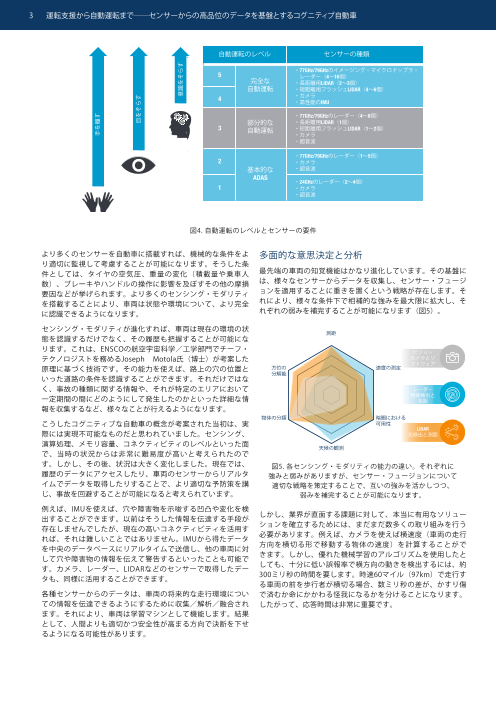
図4. 自動運転のレベルとセンサーの要件
より多くのセンサーを自動車に搭載すれば、機械的な条件をよ 多面的な意思決定と分析
り適切に監視して考慮することが可能になります。そうした条
件としては、タイヤの空気圧、重量の変化(積載量や乗車人 最先端の車両の知覚機能はかなり進化しています。その基盤に
数)、ブレーキやハンドルの操作に影響を及ぼすその他の摩損 は、様々なセンサーからデータを収集し、センサー・フュージ
要因などが挙げられます。より多くのセンシング・モダリティ ョンを適用することに重きを置くという戦略が存在します。そ
を搭載することにより、車両は状態や環境について、より完全 れにより、様々な条件下で相補的な強みを最大限に拡大し、そ
に認識できるようになります。 れぞれの弱みを補完することが可能になります(図5)。
センシング・モダリティが進化すれば、車両は現在の環境の状 測距
態を認識するだけでなく、その履歴も把握することが可能にな
ります。これは、ENSCOの航空宇宙科学/工学部門でチーフ・ ビジョン
テクノロジストを務めるJoseph Motola氏(博士)が考案した カメラとソ
フトウェア
原理に基づく技術です。その能力を使えば、路上の穴の位置と 方位の 速度の測定
分解能
いった道路の条件を認識することができます。それだけではな
く、事故の種類に関する情報や、それが特定のエリアにおいて レーダー
一定期間の間にどのようにして発生したのかといった詳細な情 無線検出と測距
報を収集するなど、様々なことが行えるようになります。
物体の分類 暗闇における
こうしたコグニティブな自動車の概念が考案された当初は、実 可用性
LIDAR
際には実現不可能なものだと思われていました。センシング、 光検出と測距
演算処理、メモリ容量、コネクティビティのレベルといった面 天候の観測
で、当時の状況からは非常に難易度が高いと考えられたので
す。しかし、その後、状況は大きく変化しました。現在では、 図5. 各センシング・モダリティの能力の違い。それぞれに
履歴のデータにアクセスしたり、車両のセンサーからリアルタ 強みと弱みがありますが、センサー・フュージョンについて
イムでデータを取得したりすることで、より適切な予防策を講 適切な戦略を策定することで、互いの強みを活かしつつ、
じ、事故を回避することが可能になると考えられています。 弱みを補完することが可能になります。
例えば、IMUを使えば、穴や障害物を示唆する凹凸や変化を検
出することができます。以前はそうした情報を伝達する手段が しかし、業界が直面する課題に対して、本当に有用なソリュー
存在しませんでしたが、現在の高いコネクティビティを活用す ションを確立するためには、まだまだ数多くの取り組みを行う
れば、それは難しいことではありません。IMUから得たデータ 必要があります。例えば、カメラを使えば横速度(車両の走行
を中央のデータベースにリアルタイムで送信し、他の車両に対 方向を横切る形で移動する物体の速度)を計算することがで
して穴や障害物の情報を伝えて警告するといったことも可能で きます。しかし、優れた機械学習のアルゴリズムを使用したと
す。カメラ、レーダー、LIDARなどのセンサーで取得したデー しても、十分に低い誤報率で横方向の動きを検出するには、約
タも、同様に活用することができます。 300ミリ秒の時間を要します。時速60マイル(97km)で走行す
る車両の前を歩行者が横切る場合、数ミリ秒の差が、かすり傷
各種センサーからのデータは、車両の将来的な走行環境につい で済むか命にかかわる怪我になるかを分けることになります。
ての情報を伝達できるようにするために収集/解析/融合され したがって、応答時間は非常に重要です。
ます。それにより、車両は学習マシンとして機能します。結果
として、人間よりも適切かつ安全性が高まる方向で決断を下せ
るようになる可能性があります。
手を離す
手を離す
目をそらす
目をそらす
意識意を識をそそららすす
Page4
4 運転支援から自動運転まで――センサーからの高品位のデータを基盤とするコグニティブ自動車
レーダー(10GHz~100GHz) LIDAR(900nm~1600nm) ビジョン(400nm~1000nm)
・角度の分解能:~ λ = 4 m m = 3° ・角度の分解能:~ λ = 1 . 5 u m = 0.1° ・角度の分解能: ~0.01°
D 80mm D 1mm (ピクセル数によって制限を受ける)
・物体の追跡(奥行きと動き) ・レーダーとビジョンの間をつなぐ ・物体の認識
・環境からの影響を受けない ・夜間性能は良好だが、悪条件下での ・昼光下の視界は、良好な条件下では
・成熟した自動車技術 性能は中程度 最良
・アクティブ ・新しい自動車技術 ・成熟した自動車技術
・アクティブ ・アクティブまたはパッシブ
= レーダー
= ビジョン
ドアの開閉支援
= LIDAR 側面衝突の検出
3Dマッピングによる
高精度なポジショニング クロス・
トラフィックの
検出 サラウンド・ビュー 死角に対応した
による駐車支援 車線変更支援
アダプティブ・ 歩行者/
クルーズ・コントロール 衝突の検出と回避 後方衝突の検出と駐車
サラウンド・ビュー
による駐車支援 死角に対応したクロス・
カメラのみ: 車線変更支援トラフィックの
車線維持の支援 検出
交通標識の認識
LIDAR ドアの開閉支援
第1の導入段階:前方 側面衝突の検出
第2の導入段階:360°
図6. 完全にコグニティブな自動車。高度なレーダー、LIDAR、カメラに加え、
IMUと超音波を用いた360°の可視性によって実現されます。
300ミリ秒の遅延は、連続するビデオ・フレームから差分ベク 但し、850nm~940nmの近赤外域(NIR:Near Infrared)での
トル計算を実行するために必要な時間によって発生します。高 動作は網膜にとって有害なので、905nmにおけるエネルギー出
い信頼性で検出を行うには、10枚以上の連続フレームが必要で 力は、パルス当たり200nJまでと厳格に規制されています。一
すが、それを1枚か2枚の連続フレームにまで減らして、車両が 方、1500nm以上の短波長赤外域(SWIR:Shortwave IR)の光
反応するための時間を確保しなければなりません。これはレー は、目の表面全体で吸収されます。そのため、この帯域では、
ダーであれば達成できます。 パルス当たり8mJまで規制が緩和されます。1500nmのパルス
レーダーは、方位角と高度に対する高い分解能を備え、物体の LIDARシステムは、905nmのLIDARシステムと比べてエネルギ
周囲を見渡す能力が高いといった特徴を備えています。つま ーのレベルが4万倍に達し、対象とする距離は4倍にもなりま
り、速度と物体の検出については、多くのメリットを提供して す。また、そうしたシステムを採用すれば、もや、埃、浮遊粒
くれます。ただ、レーダーを使う場合にも、車両が反応するた 子といった条件に対しても、より堅牢性の高い測定機能を実現
めの時間をより長く確保する必要があります。時速400km以上 できます。
の速度を明確に判定するという目標に向けて、77GHz~79GHz 1500nmのLIDARが抱える課題は、システムにかかるコストで
を使用する新しいレーダーの開発が進んでいます。このレベル す。その主な原因は、光検出器に関する技術(今日のものは
の速度を判定するというのは、極端な条件だと思われるかもし InGaAs技術をベースとします)にあります。高い感度、少ない
れません。しかし、中央分離帯が存在する複雑な幹線道路で、 暗電流、低い容量を備えた高品質のソリューションを実現する
車両が双方向に時速200km以上で走行するケースに対応するに ことが、1500nmのLIDARを活用する上での鍵になります。ま
は、それだけの能力が必要になります。 た、LIDARシステムが第2世代、第3世代へと進化するにつれ、
カメラとレーダーの間をつなぐのがLIDARです。LIDARは、その サイズ、消費電力、全体的なシステム・コストを抑えるため
特質が理由となって、完全にコグニティブな自動車の実現に不 に、用途に応じて最適な形で回路を集積することが必要になり
可欠な要素となっています(図6)。但し、LIDARについても、 ます。
今後解消しなければならない課題が存在します。 超音波、カメラ、レーダー、LIDAR以外にも、完全にコグニテ
LIDARは、コンパクトでコスト効果の高い半導体をベースとす ィブな自律運転を実現する上で重要な役割を担うセンシング・
る方向で進化しています。車両の周りの複数個所に配置するこ モダリティがあります。それはGPSです。これは、任意の時点
とにより、360°の全方位をカバーすることができます。これ における車両の位置を把握するために使用します。しかし、ト
を追加すれば、角度の測定についてより高い分解能が得られ、 ンネルの中や高層ビルの狭間など、GPSの信号を利用できない
奥行きに関する知覚がより適切になります。つまり、レーダー 場所もあります。そのような場所では、慣性装置が重要な役割
とカメラの能力が補完されることになります。結果として、環 を担います。
境に関するより正確な3Dマップを作成することが可能になりま
す。
サラウンド・
ビューによる駐車支援
サラウンド・リア
・ビュー
Page5
5 運転支援から自動運転まで――センサーからの高品位のデータを基盤とするコグニティブ自動車
見落とされがちですが、IMUは環境の条件にかかわらず一定で け十分にトレーニングしたとしても、モデルを一度作成してネ
ある重力に基づいて機能します。そのため、デッド・レコニン ットワークのエッジ・デバイス上に配備した後は、センサーに
グに対して非常に有効です。GPSの信号が一時的に利用できな よって得たデータだけがその信頼性、精度、有効性の拠り所に
くなった場合には、デッド・レコニングにより、速度メーター なります。これは純然たる事実です。
やIMUなどからのデータを利用することで、走行距離や方向を
検出することができます。得られたデータは高解像度のマップ センシング・モダリティ、センサー・フュージョン、信号処
にオーバーレイします。GPSの信号を取得できるようになるま 理、AIの間の相互作用は、スマートでコグニティブな自動運転
での間、コグニティブな自動車は、その方法によって正しい軌 車の進化に計り知れない影響を与えます。また、運転者/搭乗
跡を維持します。 者/歩行者の安全性を確保できるという自信の拠り所にもなります。しかし、安全な自動運転車の基盤になるのは、センサー
高品位のデータによる時間の短縮と生命の保護 によって得たデータです。信頼性、確度/精度の高いデータがなければ、すべての意味が失われます。
センシング・モダリティでは、センサーから質の高いデータを
取得できることが重要になります。センサー自体が信頼できな どのような先端技術でもそうですが、取り組みを進めれば進め
いものであったり、その出力信号を正確に取得して高精度なデ るほど、より複雑なユース・ケースが見つかって対処が必要に
ータとして上流に供給できなかったりすると、システムは重要 なります。しかも、その複雑さは絶えず既存の技術の範囲を上
な判断を適切に行うことはできません。「garbage in, garbage 回っていきます。そのため、そうした問題の解決に役立つ次世
out」(無意味なデータを入力すると無意味な結果が返される) 代のセンサーやセンサー・フュージョンのアルゴリズムに対す
というフレーズが、これほどまでぴったりと当てはまる状況も る期待が高まっていきます。
めったにないでしょう。 月探査ロケットの打ち上げと同様に、自動運転車の実現に向け
最先端のアナログ・シグナル・チェーンを採用している場合で たあらゆるイニシアチブは、社会に長く続く変革的な影響を与
も、センサーからの出力信号の検出、取得、デジタル変換につ えると考えられます。運転支援から自動運転への移行は、輸送
いて常に改善を図り、時間と温度に依存して精度と確度がドリ 手段の安全性を劇的に向上させるだけでなく、生産性の大幅な
フトしないようにする必要があります。適切なコンポーネン 向上にもつながるはずです。その未来は、あらゆるものの基盤
トを使用し、ベスト・プラクティスに従って設計を行うことに となるセンサーの上に成り立ちます。
より、バイアスの温度ドリフト、位相ノイズ、干渉といった難 アナログ・デバイセズは、25年間にわたり、自動車の安全性を
易度の高い問題や、その他の不安定さに起因する現象の影響を 確保するためのADASの開発にかかわってきました。現在、当
大きく緩和することができます。高精度/高品位のデータは、 社は明日の自動運転を実現するための土台を築いています。セ
機械学習/AI向けのプロセッサを使って適切にトレーニングを ンター・オブ・エクセレンス(CoE)を中心とする体制で、慣
実施し、稼働時に適切な判断を行えるようにするための基盤に 性ナビゲーションや監視、高精度のレーダー、LIDARの開発に
なります。また、そうした判断が必要になる重要な局面におい 取り組んでいます。その成果として、高性能のセンサー、シグ
て、2度目のチャンスが与えられることはほぼありません。 ナル・チェーン、電源のソリューションを提供し、システムの
データの質が保証されれば、センサー・フュージョンの様々な 性能の劇的な向上に貢献しています。それだけでなく、プラッ
手法やAIのアルゴリズムによる応答を、適切な結果が得られる トフォーム全体の総所有コストを低減することで、未来に向け
ように最適化することができます。AIのアルゴリズムをどれだ た歩みを加速させています。
Page6
著者について オンライン・
Chris Jacobs(chris.jacobs@analog.com)は、アナログ サポート・
・デバイセズのバイスプレジデントとして、自律輸送/ コミュニティ
車両安全事業部門を担当しています。1995年に入社後、
民生、通信、産業、車載チームにおいて、設計エンジニ アナログ・デバイセズのオンライン・サポート・コミュ
アリング、設計管理、ビジネス関連の業務を担当してき ニティに参加すれば、各種の分野を専門とする技術者
ました。車両安全部門のゼネラル・マネージャ、高精度 との連携を図ることができます。難易度の高い設計上
コンバータ部門の製品/技術ディレクタ、高速コンバー の問題について問い合わせを行ったり、FAQ を参照し
タおよび絶縁製品部門の製品ライン・ディレクタなど、 たり、ディスカッションに参加したりすることが可能
指導的職位を歴任してきました。クラークソン大学でコ です。
ンピュータ工学の学士号、ノースイースタン大学で電気
工学の修士号、ボストン・カレッジで経営学の修士号を ez.analog.com にアクセス
取得しています。
*英語版ソート・リーダーシップ記事はこちらより
ご覧いただけます。
本 社 〒105-6891 東京都港区海岸1-16-1 ニューピア竹芝サウスタワービル10F
大阪営業所 〒532-0003 大阪府大阪市淀川区宮原3-5-36 新大阪トラストタワー10F
名古屋営業所 〒451-6040 愛知県名古屋市西区牛島町6-1 名古屋ルーセントタワー38F
©2019 Analog Devices, Inc. All rights reserved.
本紙記載の商標および登録商標は、
各社の所有に属します。
Ahead of What’s Possible は
アナログ・デバイセズの商標です。 www.analog.com/jp
T21304-6/19