


UAVに適したSDRベースのビデオ伝送、 高精細度と低遅延を実現
アナログ・デバイセズ(ADI)は、集積度の高いRFアジャイル・トランシーバICを提供しています。
この種の製品は、MDAS(Multi-service Distributed AccessSystem)やスモールセルなど、携帯電話基地局で使われるSDR(ソフトウェア無線)1のアーキテクチャでよく使用されていますが、それ以外にも注目すべき用途があります。
現在、産業 /民 生 /軍事分野では無人航空機 (UAV)が利用されるケースが増えてきました。このUAVにおけるワイヤレスHD(高精細)ビデオ伝送にも、RFアジャイル・トランシーバICが活用されているのです。
本カタログのテーマは、集積度の高いトランシーバIC「AD9361」「AD9364」2、3を使用した広帯域ワイヤレス・ビデオ伝送です。このアプリケーションに関して、シグナル・チェーンの構成、やり取りされるデータ量、RF占有信号帯域幅、通信距離、トランスミッタの送信パワーなどの話題を取り上げます。
◆詳細は、カタログをダウンロードしてご覧ください。
このカタログについて
| ドキュメント名 | 集積度の高いトランシーバ IC「AD9361」「AD9364」を使用『広帯域ワイヤレス・ビデオ伝送』 |
|---|---|
| ドキュメント種別 | その他 |
| ファイルサイズ | 1.4Mb |
| 登録カテゴリ | |
| 取り扱い企業 | アナログ・デバイセズ株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
UAVに適したSDRベースのビデオ伝送、
高精細度と低遅延を実現
著者:Wei Zhou
Share on
概要 どれくらいのデータ量を伝送するのか
アナログ・デバイセズ(A D I)は、集積度の高いR Fア 表1は、非圧縮データレートと圧縮データレートでどれ
ジャイル・トランシーバ I Cを提供しています。この種 だけデータ量に差があるのかを示したものです。H.265
の製品は、MDAS(Mult i - serv ice Dis t r ibu ted Access またはMPEG-H Par t 2としても知られるHEVC(高効率
S y s t e m)やスモールセルなど、携帯電話基地局で使わ ビデオ・コーディング)を使用すれば、データレートを
れるS D R(ソフトウェア無線) 1のアーキテクチャでよ 下げて帯域幅を抑えることができます。現在ビデオ・コ
く使用されていますが、それ以外にも注目すべき用途 ンテンツの録画 /圧縮 /配信に最もよく利用されている方
があります。現在、産業 /民生 /軍事分野では無人航空 式の1つにH.264があります。HEVCはビデオ圧縮のあり
機(U AV)が利用されるケースが増えてきました。こ 方を大きく前進させるものであり、広く使用されている
のU AVにおけるワイヤレスH D(高精細)ビデオ伝送に AVC(H.264またはMPEG-4 Par t 10)の後継となり得る
も、R Fアジャイル・トランシーバ I Cが活用されている 有望な技術です。
のです。本稿のテーマは、集積度の高いトランシーバ
IC「AD9361」、「A D 9364」 2、3を使用した広帯域ワイ [圧縮データレート]= [非圧縮データレート]
ヤレス・ビデオ伝送です。このアプリケーションに関 [圧縮率]
して、シグナル・チェーンの構成、やり取りされるデー
タ量、R F占有信号帯域幅、通信距離、トランスミッタ 表1には、さまざまなビデオ伝送方式について、圧縮し
の送信パワーなどの話題を取り上げます。また、OFDM た場合、非圧縮の場合のデータレートがまとめられてい
(直交周波数分割多重方式)の物理層の実現方法につい ます。ここでは、ビデオのビット深度が24ビット、フレ
て述べるほか、R F信号の干渉を回避するための周波数 ーム・レートが60fps(フレーム /秒)であると仮定して
ホッピングに関するテスト結果も示します。最後に、広 います。1080pを例にとると、圧縮後のデータレートは
帯域ワイヤレス・アプリケーションにおけるWi-F iトラ 1 4 . 9 3 M b p s(メガビット /秒)です。したがって、ベー
ンシーバとR Fアジャイル・トランシーバの長所と短所 スバンド・プロセッサとワイヤレスの物理層で容易に処
について考察します。 理することができます。
表1. 圧縮データレート
シグナル・チェーン
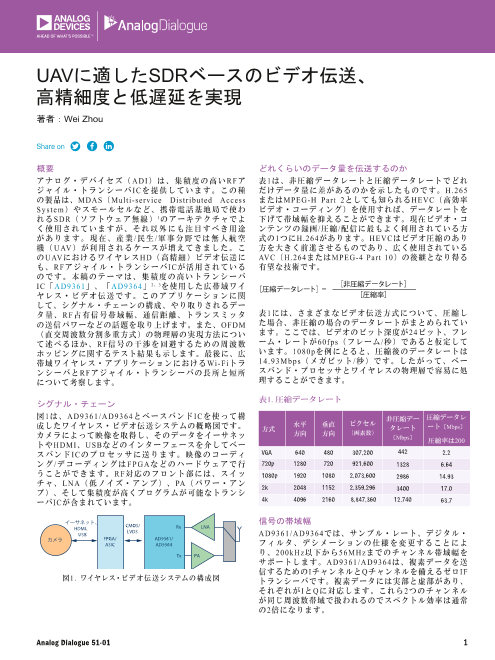
図 1は、A D 9 3 6 1 / A D 9 3 6 4とベースバンド I Cを使って構 非圧縮デー 圧縮データレ
成したワイヤレス・ビデオ伝送システムの概略図です。 水平 垂直 ピクセル 方式 タレート ート〔Mbps〕
カメラによって映像を取得し、そのデータをイーサネッ 方向 方向 (画素数) 〔Mbps〕
トやHDMI、USB 圧縮率は200などのインターフェースを介してベー
スバンド I Cのプロセッサに送ります。映像のコーディ VGA 640 480 307,200 442 2.2
ング /デコーディングは F P G Aなどのハードウェアで行 720p 1280 720 921,600 1328 6.64
うことができます。R F対応のフロント部には、スイッ 1080p 1920 1080 2,073,600 2986 14.93
チャ、L N A(低ノイズ・アンプ)、PA(パワー・アン 2k 2048 1152 2,359,296 3400 17.0
プ)、そして集積度が高くプログラムが可能なトランシ
ーバ ICが含まれています。 4k 4096 2160 8,847,360 12,740 63.7
イーサネット、 信号の帯域幅
、 CMOS/HDMI Rx LNALVDS
USB AD9361 /AD9364では、サンプル・レート、デジタル・
カメラ FPGA/ AD9361/
ASIC AD9364 フィルタ、デシメーションの仕様を変更することによ
Tx PA り、200kHz以下から56MHzまでのチャンネル帯域幅を
サポートします。AD9361 /AD9364は、複素データを送
信するための IチャンネルとQチャンネルを備えるゼロ IF
図1 . ワイヤレス・ビデオ伝送システムの構成図 トランシーバです。複素データには実部と虚部があり、
それぞれが IとQに対応します。これら2つのチャンネル
が同じ周波数帯域で扱われるのでスペクトル効率は通常
の2倍になります。
Analog Dialogue 51-01 1
Page2
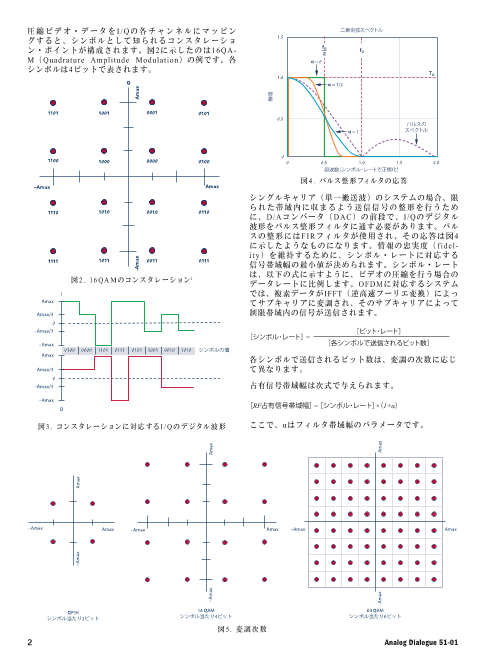
圧縮ビデオ・データを I / Qの各チャンネルにマッピン 二乗余弦スペクトル
1.5
グすると、シンボルとして知られるコンスタレーショ
f
ン・ポイントが構成されます。図2に示したのは1 6 Q A - O f2 O
M(Quadra ture Ampl i tude Modula t ion)の例です。各 α = 0
シンボルは4ビットで表されます。 TO
1.0
Q α = 1/2
1101 1001 0001 01 01
0.5
パルスの
α = 1 スペクトル
0
1100 1000 0000 01 00 0 0.5 1.0 1.5 2.0
周波数(シンボル・レートで正規化)
図 4 . パルス整形フィルタの応答
–Amax Amax
シングルキャリア(単一搬送波)のシステムの場合、限
られた帯域内に収まるよう送信信号の整形を行うため
1110 1010 00 10 01 10
に、D / Aコンバータ(D A C)の前段で、 I / Qのデジタル
波形をパルス整形フィルタに通す必要があります。パル
スの整形にはF I Rフィルタが使用され、その応答は図 4
に示したようなものになります。情報の忠実度( f i d e l -
i t y)を維持するために、シンボル・レートに対応する
1111 1011 00 11 01 11
信号帯域幅の最小値が決められます。シンボル・レート
は、以下の式に示すように、ビデオの圧縮を行う場合の
図 2 . 16 Q A Mのコンスタレーション4
データレートに比例します。OFDMに対応するシステム
I では、複素データが IFFT(逆高速フーリエ変換)によっ
Amax てサブキャリアに変調され、そのサブキャリアによって
Amax/3 制限帯域内の信号が送信されます。
0
–Amax/3 [ビット・レート]
[シンボル・レート] =
–Amax [各シンボルで送信されるビット数]
010 0 0000 1101 0111 0101 1001 0010 1010 シンボルの値
Amax
各シンボルで送信されるビット数は、変調の次数に応じ
Amax/3 て異なります。
0
–Amax/3 占有信号帯域幅は次式で与えられます。
–Amax
Q [RF占有信号帯域幅] =[ シンボル・レート]×(1+α)
図 3 . コンスタレーションに対応する I / Qのデジタル波形 ここで、αはフィルタ帯域幅のパラメータです。
–Amax Amax –Amax Amax –Amax Amax
QPSK 16 QAM 64 QAM
シンボル当たり2ビット シンボル当たり4ビット シンボル当たり6ビット
図 5 . 変調次数
2 Analog Dialogue 51-01
–Amax Amax
–Amax Amax
–Amax Amax
振幅
–Amax Amax
Page3
上に示した式から次式を導くことができます。 Smin = 10log(kT
S
0B) + NF + (N )min = –174 dBm + 10logB + NF + ( S )min[圧縮データレート] N
[RF占有信号帯域幅]= × (1 + α)
[各シンボルで伝送される ここで、各変数の意味は以下のとおりです。
ビット数] (S/N)min:信号を処理するために必要な最小のS/N比
この式から、表2にまとめたようにRF占有信号帯域幅を NF:レシーバのノイズ指数
求めることができます。
k:ボルツマン定数(1.38 × 10 –23 jou le /k)
表 2. 異なる変調次数に対するRF占有信号帯域幅 T 0:レシーバの入力部の絶対温度(ケルビン温度)
(α=0.25)
B:レシーバの帯域幅(単位はHz)
圧縮デー QPSKの 16QAMの 64QAMの
方式 タレート 信号帯域幅 信号帯域幅 信号帯域幅
〔Mbps〕 〔MHz〕 〔MHz〕 〔MHz〕 (S / N) m i nは変復調の次数によって異なります。S / N比
が同じである場合、変調次数の低い方がシンボル・エラ
VGA 2.2 1.375 0.6875 0.4583
ーは少なくなります。シンボル・エラーが同等である場
720p 6.6 4.1250 2.0625 1.3750 合、変調次数が高い方が復調するためにより高いS/N比
1080p 14.9 9.3125 4.6563 3.1042 を必要とします。トランスミッタがレシーバからかなり
2k 17.0 10.6250 5.3125 3.5417 離れている場合には信号が弱くなります。したがって、
そのS/N比では高次の復調に対応できないということが
4k 63.7 39.8125 19.9063 13.2708
起こります。トランスミッタを稼働させたまま、あるビ
デオ方式で同じデータレートを維持するためには、ベー
AD9361/AD9364の最大信号帯域幅は56MHzです。両製 スバンド部において帯域幅の拡張と引き換えに変調の次
品は、表2に示す全てのビデオ伝送方式だけでなく、よ 数を下げるべきです。そうすることで、受信した画像が
り高いフレーム・レートにも対応します。変調の次数を 不鮮明にならないようにします。幸い、デジタル変復調
上げると占有帯域幅は狭くなり、シンボルにおけるビッ の機能を備えるSDRでは、変調方式を変更することが可
ト当たりの情報量は増加します。ただし、正しく復調を 能です。先述した分析内容は、トランスミッタのR Fパ
行うためには高いS/N比が必要になります。 ワーが一定であるという仮定に基づいています。アンテ
ナのゲインを変えずにR F送信パワーを大きくすると、
通信距離とトランスミッタのパワー レシーバの感度を高めなくても、より遠くで信号を受信
U AVなどのアプリケーションでは、最大通信距離が非 できます。ただし、最大送信パワーについてはFCC/CE
常に重要なパラメータになります。それほど長い通信距 の放射に関する規格に準拠しなければなりません。
離は求められないケースもありますが、そうした場合で また、通信距離はキャリア周波数に依存します。波が空
も、通信が遮断されないことが非常に重要になります。 間を伝搬する際には分散による損失が生じます。自由空
信号は、(自由空間での減衰とは別に)酸素や水などの 間における損失は次式によって求められます。
障害物によって減衰する可能性があります。
4�R 4�Rf
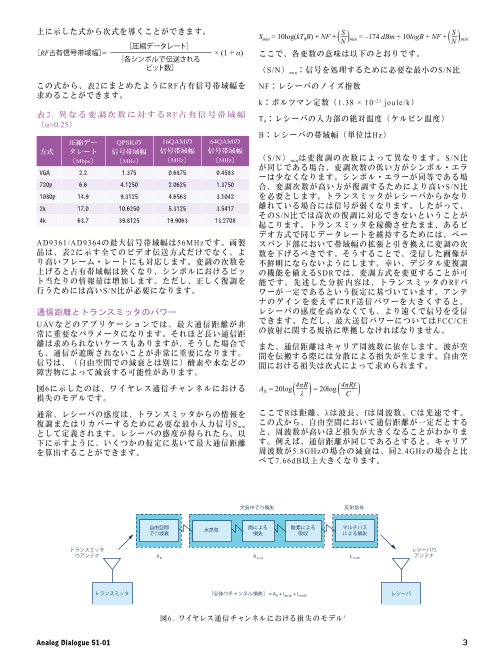
図6に示したのは、ワイヤレス通信チャンネルにおける Afs = 20log( λ ) = 20log ( C )
損失のモデルです。
通常、レシーバの感度は、トランスミッタからの情報を ここでRは距離、 λは波長、 fは周波数、Cは光速です。
復調またはリカバーするために必要な最小入力信号S この式から、自由空間において通信距離が一定だとするmin
として定義されます。レシーバの感度が得られたら、以 と、周波数が高いほど損失が大きくなることがわかりま
下に示すように、いくつかの仮定に基いて最大通信距離 す。例えば、通信距離が同じであるとすると、キャリア
を算出することができます。 周波数が5 .8GHzの場合の減衰は、同2 .4GHzの場合と比
べて7.66dB以上大きくなります。
大気中での損失 反射信号
自由空間 水蒸気 雨による 酸素による マルチパスでの減衰 損失 吸収 による損失
トランスミッタ レシーバの
のアンテナ Afs Aprop L multi アンテナ
トランスミッタ [全体のチャンネル損失] = Afs + Lprop + Lmulti レシーバ
図 6 . ワイヤレス通信チャンネルにおける損失のモデル 5
Analog Dialogue 51-01 3
Page4
RF周波数とスイッチング
A D 9 3 6 1 / A D 9 3 6 4は7 0 M H z~6 G H zの周波数範囲に対応 (a) (b)
しています。具体的にどの周波数を使用するかはプロ
グラムによって選択可能です。このような周波数範囲
に対応していることから、 1 . 4 G H z、 2 . 4 G H z、 5 . 8 G H z
な ど 、 免 許 が 必 要 /不 要 な 周 波 数 を 含 む ほ と ん ど の
NLOS(Non Line-of -Sight:見通し外)周波数アプリケ
ーションで利用できます。
(c) (d)
2 .4GHzの周波数帯は、Wi-F i、Blue too th、 IoT( In t e r-
ne t of Things)向けの短距離通信に広く使用されてお
り、非常に混雑しています。この周波数帯をワイヤレ
ス・ビデオ伝送と制御信号の通信に使用すると、信号
が干渉したり、不安定になったりする可能性が高まりま
す。言うまでもなく、これはUAVにとって望ましいこと
ではなく、危険な状態に陥る可能性があります。そこで
使用されるのが、周波数スイッチングという手法です。
これは、干渉などが生じないクリーンな周波数を使える 図 7. 8 0 4 . 5 M H zから8 0 2 M H zへの
状態を維持することで、データや制御信号の通信を信 周波数ホッピングには 5 0 0 μ sかかる
頼性の高い状態に保つというものです。トランスミッタ
は、周波数帯が混雑していることを感知したら、他の周 周 波 数 ホ ッ ピ ン グ を 使 用 す る ア プ リ ケ ー シ ョ ン で
波数帯を使用するように自動的に切り替えを行います。 は 、 5 0 0 μ sと い う の は 非 常 に 長 い 時 間 で す 。 そ こ
例えば、近接する周波数を使用して運用されている2機 で、AD9361 /AD9364には、通常よりも高速な周波数ホ
のUAVは、互いの通信に対して干渉を及ぼします。その ッピングを実現するための高速ロック・モードが用意さ
場合、自動的にL O(局部発振)周波数を切り替えて周 れています。このモードでは、シンセサイザに関する一
波数帯を選択し直すことにより、安定したワイヤレス・ 連のプログラミング情報(プロファイルと呼ばれます)
リンクを維持することができます。稼働中にキャリア周 を自身のレジスタまたはベースバンド・プロセッサの
波数やチャンネルを柔軟に選択できる機能は、ハイエン メモリ領域に保存することによって高速化が実現されま
ドのUAVにふさわしいものだと言えます。 す。図8に示したのは、高速ロック・モードを使用して
8 8 2 M H zから8 0 2 M H zへの周波数ホッピングを実行した
時のテスト結果です。図 8( d)の位相応答を見ると、
周波数ホッピング 必要な時間が 20μ s以下に抑えられていることがわかり
電子対抗手段(ECM:Elec t ronic Countermeasures)で ます。なお、位相を表す曲線は、802MHzの位相を基準
は、高速周波数ホッピングが広く使用されています。こ にしてプロットした結果です。周波数情報とキャリブ
れも干渉を回避する手段として有用です。通常、周波数 レーション結果がプロファイルに保存されていることか
ホッピングを行う場合には、一連の処理を実施した後に ら、SPI(Ser ia l Per iphera l In te r face)による書き込み
フェーズ・ロック・ループ(PLL)を再ロックする必要 時間とVCOのキャリブレーション時間はこのモードでは
があります。その際には、周波数に関するレジスタへの 排除されます。図8(b)はAD9361 /AD9364の高速周波
書き込み時間、VCO(電圧制御発振器)のキャリブレー 数ホッピング機能の様子を表しています。
ション時間、PLLロック時間が必要になります。そのた
め、周波数ホッピングには数百μs程度の時間がかかりま
す。図7は、トランスミッタのLO周波数を816.69MHzか
ら802.03MHzにホッピングする例を示したものです。通 (a) (b)
常、AD9361は周波数を変更可能なモードで使用されま
す。トランスミッタのR F出力周波数は、1 0 M H zの周波
数を基準として 8 1 4 . 6 9 M H zから 8 0 0 . 0 3 M H zにジャンプ
します。周波数ホッピングにかかる時間は、図7に示す
ようにシグナル・ソース・アナライザ(Keysight Tech-
n o l o g i e s社の「E 5 0 5 2 B」)を使うことでテストできま
す。図 7( b)の結果から、V C Oのキャリブレーション (c) (d)
とP L Lのロックにかかる時間は約500μsです。このよう
に、シグナル・ソース・アナライザを使えば、PLLの過
渡応答を捉えることができます。図 7( a)は広帯域モ
ードにおける過渡応答の測定結果です。図7(b)と図7
(d)は、周波数ホッピングによる周波数および位相の
過渡応答をかなり高い解像度で示したものです 6。図 7
(c)は出力パワーの応答を表しています。
図 8 . 高速ロック・モードでは、2 0 μ s以内で 8 8 2 M H zから
8 0 2 M H zまでの周波数ホッピングを実行できる
4 Analog Dialogue 51-01
Page5
OFDMに対応する物理層 ドシェイクを実行しなければならないと定められてい
O F D Mは変調方式の1つです。この方式では、高いデー ます。各データ・パケットについては、各パケットに
タレートで変調されたストリームを低速に変調されたサ 含まれる512バイトの全てを問題なく受信したことを確
ブキャリアに分割します。サブキャリアとしては、近 認する必要があります。もし1バイトでも失われていた
8
接する狭い帯域が使用されます。このような処理を行 ら、512バイトの全てを再び送信しなければなりません
うことにより、周波数フェージングに対する感度を下 。確かに、このようなプロトコルであればデータの信頼
げることができます。この方式の短所は、PAPR(Peak 性を高めることができます。しかし、ワイヤレスのデー
to Average Power Rat io)が高いことと、キャリアの タ・リンクを再確立するには複雑な処理を行わなければ
オフセットとドリフトに対して感度が高くなることで ならず、相応の時間がかかります。例えば、T C P / I Pは
す。O F D Mは広帯域ワイヤレス通信の物理層で広く採 遅延が大きく、ビデオの伝送や制御をリアルタイムで行
用されています。OFDMを実現するための主要な技術と うことは困難です。このことが原因で、T C P / I Pを利用
しては、 I F F T / F F T、周波数同期、サンプリング時間同 するUAVは墜落の危険にさらされる可能性があります。
期、シンボル /フレーム同期などが挙げられます。 IFFT/ それに対し、F P G AとA D 9 3 6 1を組み合わせたS D Rソリ
F F Tは、F P G Aによってできるだけ高速に実行できるよ ューションは、1ウェイのデータ・ストリームを採用し
うにすべきです。また、サブキャリアの間隔を決める ています。つまり、空中に浮かんでいるドローンからビ
ことも非常に重要な要素になります。その間隔は、通信 デオ信号をテレビ放送のように送信できるということで
機能を備える移動体が周波数のドップラー・シフトに す。実際、リアルタイムのビデオ伝送を目標とするので
十分に耐えられるように大きく設定したいところです。 あれば、パケットを再送する時間は許容できません。
しかし、スペクトル効率を高めるために限られた周波 また、Wi-F iでは、多くのアプリケーションに対して適
数帯域内でより多くのシンボルを送信できるようにする 切なレベルのセキュリティが提供されるわけではありま
ためには、サブキャリアの間隔は小さく設定しなけれ せん。それに対し、F P G AとA D 9 3 6 1 / A D 9 3 6 4を組み合
ばなりません。エンコーディング技術とOFDM変調を組 わせたソリューションでは、暗号化用のアルゴリズム
み合わせていることを指してCOFDM(coded OFDM) とユーザーが定義可能なプロトコルを利用することによ
という用語が使われることがあります。COFDMは、信 り、セキュリティ面での脅威をかなり抑えることができ
号の減衰に対する高い耐性を備えています。また、前 ます。
方誤り訂正(FEC)を適用することも可能です。そのた
め、COFDMを利用すれば、移動体からビデオ信号を適 さらに、1ウェイのデータ・ストリーム配信であれば、-
切に送信できるようになります。エンコーディングを行 Wi - F iの 2~ 3倍の通信距離に対応可能です 8。 S D Rが提
うには信号の帯域幅を広くとる必要がありますが、トレ 供する柔軟性によってデジタル変復調の調整を行うこと
ードオフを行う価値があると言えます。 で、距離の要件を満たすことができます。また、複雑な
放射環境に応じてS/N比を変更するように調整を行うこ
集積度の高いアナログ・デバイセズのR Fトランシーバ とも可能です。
ICに、The MathWorks社のモデル・ベース設計ツール /
自動コード生成ツールと、 X i l i n x社の強力な「 Z y n q -
7000 Al l Programmable SoC」を組み合わせれば、従来 まとめ
に比べ、SDRシステムの設計、検証、テスト、実装を効 本稿では、F P G AとA D 9 3 6 1 / A D 9 3 6 4を組み合わせたソ
率的に行えるようになります。その結果、無線システム リューションによって高精細のワイヤレス・ビデオ伝送
の高性能化と開発期間の短縮を両立することが可能にな を実現する場合に重要な意味を持つパラメータについて
ります 7。 説明しました。このソリューションを利用すれば、俊敏
な周波数スイッチングと高速周波数ホッピングによって
Wi-Fiは最善の解なのか? 安定性と信頼性の高いワイヤレス・リンクを確立できま
す。また、複雑化が進む伝送路における放射の影響を抑
Wi-F iを搭載したドローンは、携帯電話やノート型パソ え、墜落の可能性を低減することが可能になります。加
コンといったモバイル機器に対し、無線によって非常 えて、このソリューションでは、通信リンクの確立時間
に簡単に接続することができます。そのため、Wi-F iは を短縮し、遅延を抑えた接続を実現するために、1ウェ
ドローンを非常に使いやすくする技術だと言えるでしょ イの通信プロトコルを使用することができます。これに
う。しかし、U AVアプリケーションにおけるワイヤレ より、柔軟性が高まります。農業や電力線の検査、サ
ス・ビデオ伝送については、F P G AとA D 9 3 6 1を組み合 ーベイランス(調査監視)といった産業用 /民生用アプ
わせたソリューションを利用する場合の方が、Wi-F iを リケーションで成功を収めるには、安定性と信頼性が高
使用する場合よりも多くのメリットを得ることができま く、セキュアな通信を実現することが不可欠です。
す。まず、物理層については、AD9361 /AD9364を採用
すれば、迅速な周波数スイッチングと高速周波数ホッピ
ングを利用することで干渉を防止することできます。集 参考文献
積度の高いWi-Fiチップのほとんどは、混雑した2 .4GHz 1 アナログ・デバイセズが提供するソフトウェア無線ソリ
帯でも動作します。しかし、それらの製品は、ワイヤレ ューション、Analog Devices
ス接続を安定させるために周波数帯を切り替える機能は
2
備えていません。 AD9361 データシート、Analog Devices
3
F P G A A D 9 3 6 1 AD9364 データシート、Analog Devicesと を組み合わせたソリューションにはも
う1つのメリットがあります。それは、設計者が通信プ 4 Ken Genti le、アプリケーション・ノート AN-922「Dig-
ロトコルを柔軟に定義 /開発できることです。Wi-Fiの場 i ta l Pulse-Shaping Fi l te r Bas ics(デジタル・パルス整形
合、プロトコルは標準規格として定義されています。 フィルタの基本)」Analog Devices
その中では、全てのデータ・パケットで2ウェイのハン
Analog Dialogue 51-01 5
Page6
5 Scot t R . Bul lock「Transce iver and Sys tem Des ign for 7 D i P u / A n d r e i C o z m a / To m H i l l「製造までの 4つのス
Digi ta l Communica t ions , 4 th ed i t ion(デジタル通信用の テップ:モデル・ベース設計で実現するソフトウェア無
トランシーバとシステムの設計 第4版)」SciTech Pub- 線、Part 1:ADI/Xil inx社のSDR向けラピッド・プロトタ
l i sh ing , Edison , NJ、2014年 イピング用プラットフォーム――その機能、メリット、開
6 E 5 0 5 2 B S i g n a l S o u r c e A n a l y z e r, A d v a n c e d P h a s e 発ツールについて学ぶ」Analog Dia logue 49-09「
Noise and Trans ien t Measurement Techniques(シグナ 8 John Locke「Compar ing the DJI Phantom 4’s Light -
ル・ソース・アナライザ「E5052B」、位相ノイズと過渡 br idge vs . Yuneec Typhoon H’s Wi-Fi .(DJI Phantom 4
的事象の高度な計測技術)」Agi len t、2007年 のLigh tb r idgeとYuneec Typhoon HのWi-F iの比較)」
Drone Compares
Wei Zhou
著者:
Wei Zhou(Wei.Zhou@analog.com)は、アナログ・デバイセズのアプリ
ケーション・エンジニアです。主に、ワイヤレス・ビデオ伝送やワイヤレ
ス通信向けのRFトランシーバ製品とアプリケーションの設計 /開発をサポ
ートしています。中国 北京にあるアナログ・デバイセズの中央アプリケー
ション・センターで、5年間にわたって、DDS、PLL、高速DAC/ADC、
クロックなどの製品を担当してきました。2006年に中国 武漢にある武漢
大学で学士号を取得し、2009年に中国 北京にある中国科学院で修士号を
取得しています。2009年から2011年までは、航空宇宙技術に関連する企
業でR F /マイクロ波に対応する回路やシステムの設計技術者として勤務
していました。
6 Analog Dialogue 51-01