


PCベースモーションコントローラ、NCボード製品など/PC Based & Embedded Control Product Guide【Hivertec ハイバーテック総合カタログ2018年4月】
ハンドブック
Hivertec NCボード製品 / PCベースモーションコントローラについてのご案内
■Networkシステム製品、Bus製品と組込向き製品を中心に扱い易いモーションコントロール要素の展開に心掛けています。 高速なモーションの制御、タイムリーな制御要求に応じられることをモットーにしています。
■モーションコントロールの周辺要素として計測信号、入出力信号などシステム取込を提供します。
■グリーン化対応に努めています。私たちは、お客様のご意見、ご提案をお待ちします。
関連メディア
このカタログについて
| ドキュメント名 | PCベースモーションコントローラ、NCボード製品など/PC Based & Embedded Control Product Guide【Hivertec ハイバーテック総合カタログ2018年4月】 |
|---|---|
| ドキュメント種別 | ハンドブック |
| ファイルサイズ | 6.2Mb |
| 登録カテゴリ | |
| 取り扱い企業 | 株式会社ハイバーテック (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ



このカタログの内容
Page1
PC based Controller Products
HCOS Products
Motion Network Products
EtherCAT Products
motionCAT Products
PC Bus Products
PCI Express Products
PCI Products
USB Products
Ethernet Products
WiFi Products
PC/104 & Embedded Products
ISA Products
Compact PCI Products
Ver.2018.4
http://www.hivertec.co.jp
Page2
Hivertec NC ボード製品についてご案内
■Networkシステム製品、Bus製品と組込向き製品を中心に扱い易いモーションコントロール要素
の展開に心掛けています。
高速なモーションの制御、タイムリーな制御要求に応じられることをモットーにしています。
■モーションコントロールの周辺要素として計測信号、入出力信号などシステム取込を提供します。
■グリーン化対応に努めています。
私たちは、お客様のご意見、ご提案をお待ちします。
サポート体制
Web site: www.hivertec.co.jp
株式会社ハイバーテック 〒135-0007 東京都江東区新大橋1-8-11( 三井生命新大橋ビル)
■技術的なご相談 窓口 営業技術 TEL.03-3846-3801■製品選択のご相談 sales@hivertec.co.jp
■製品貸出のご相談 窓口 営 業 部 TEL.03-3846-3801■修理のご相談 sales@hivertec.co.jp
所 在 地:東京/両国(新大橋)
設 立:1983年
業務内容:モーションコントロールを中心に
計測・制御用ボードおよび
ソフトウェアの開発・製造・販売と
応用・関連システムの開発
主力製品:Bus規格のモーションコントロールボード、
カウンタボード、I/Oボード 等 両国国技館前風景
PCベースコントローラ
納入分野:半導体製造・検査装置、液晶製造・検査装置、
その他電子・電気・化学・精密機械分野の
各種製造・組立・検査・計測・搬入装置、
ロボット、医/薬分野、アミューズメント分野
等、広範囲
大川端より左手浜町、右手深川方面を望む
環境への取り組みとRoHS対応品 右手新大橋袂がハイバーテック
■我々が提案する製品の開発、製造、販売において、環境に配慮した事業活動を行い、次世代に引き継が
れる地球環境の確保、継承ができるよう努めております。
■「JIS Q 14001;2015」の要求事項に適合した環境マネジメントシステムを実施しております。
■本カタログに掲載の製品は、RoHS対応品となっております。
Page3
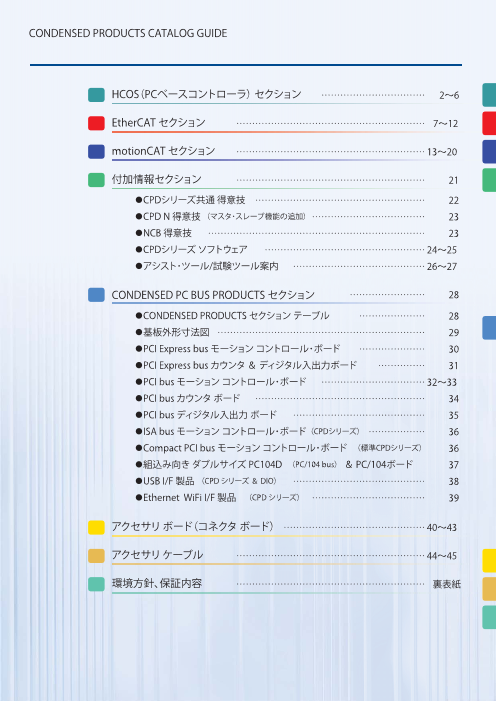
CONDENSED PRODUCTS CATALOG GUIDE
HCOS(PCベースコントローラ) セクション …………………………… 2~6
EtherCAT セクション …………………………………………………… 7~12
motionCAT セクション ……………………………………………………13~20
付加情報セクション …………………………………………………… 21
●CPDシリーズ共通 得意技 ……………………………………………… 22
●CPD N 得意技(マスタ・スレーブ機能の追加)……………………………… 23
●NCB 得意技 …………………………………………………………… 23
●CPDシリーズ ソフトウェア ……………………………………………24~25
●アシスト・ツール/試験ツール案内 ……………………………………26~27
CONDENSED PC BUS PRODUCTS セクション …………………… 28
●CONDENSED PRODUCTS セクション テーブル ………………… 28
●基板外形寸法図 ………………………………………………………… 29
●PCI Express bus モーション コントロール・ボード ………………… 30
●PCI Express bus カウンタ & ディジタル入出力ボード …………… 31
●PCI bus モーション コントロール・ボード ……………………………32~33
●PCI bus カウンタ ボード ……………………………………………… 34
●PCI bus ディジタル入出力 ボード …………………………………… 35
●ISA bus モーション コントロール・ボード(CPDシリーズ) ……………… 36
●Compact PCI bus モーション コントロール・ボード (標準CPDシリーズ) 36
●組込み向き ダブルサイズ PC104D (PC/104 bus) & PC/104ボード 37
●USB I/F 製品 (CPD シリーズ & DIO) …………………………………… 38
●Ethernet WiFi I/F 製品 (CPD シリーズ) ……………………………… 39
アクセサリ ボード(コネクタ ボード) ………………………………………40~43
アクセサリ ケーブル ……………………………………………………44~45
環境方針、保証内容 …………………………………………………… 裏表紙
Page4
Motion-control Network Products
国際標準規格 IEC 61131-3 準拠
ソフトウェア PLC EtherCAT/Motion/HMI
IoT・オープン化に適したコントローラ
HCOS Series
Hivertec Control System
Hivertec
PCベースモーションコントローラ専業35年の日本メーカー
Control
全世界で年間100万ライセンスの実績ある
ソフトウェアPLC “CODESYS” 採用
Open
特定メーカーに依存しない適材・適所なデバイスを接続可能
System
PCベースならではの巨大なメモリ・ストレージ、高性能CPU、
IoTに適した豊富なインターフェース、Windowsの利用
2
Page5
Motion-control Software Products
ハイバーテックが提供するPAC(Programmable Automation Controller)
HCOS(ハイバーテック)
CODESYS + Windows
+ EtherCAT
+ 拡張カード
+ MECHATROLINK(開発中)
+ SSCNET(開発中)
シリアル通信
•EtherCAT
•MECHATROLINK 弊社製各種拡張カード
•SSCNET 組み込み可能
•Motionnet
デジタル信号
パルス列、etc. HCOS概念図
WindowsとCODESYSは
ソケット通信、共有メモリ、ファイルIO等で同期
Soft PCL
リアルタイム拡張 Windows
画像処理 操作画面
サーバー
通信等
サーボモータ
Core1 Core2 … CoreN
マルチコア X86系CPU
●欧州で最も実績のあるソフトPLC “CODESYS” をIPCに
組み込んだIPCベースのPAC
ステッピングモータ
●プログラムは国際標準「IEC 61131-3」で記述
構造化プログラムを意識した開発環境
● IPCベース……高速CPU、巨大なストレージ、メモリ、
Ethernetなどの豊富な入出力
●Windowsが組み込まれているため、Windowsアプリと
汎用DIO 連携可能
アナログ入出力
3
Page6
Motion-control Network Products
HCOS: PC選定
■HCOS標準型式
HCOS-■■■■■□□□▲
■■■■■:IPC型式(表1参照)
□□□:組込型式(表2参照)、組込ソフトウェアまたはハードウェア構成
▲:予備…フォームファクター同形状で異なるIPCの場合など付属
表1. IPC型式
Form factor 型 式 CPU Memory SSD 拡張スロット 制御機器IF 供給期間
Wall Mount
1×PCIe(×16) EtherCAT Motion、
W54S□□□A Core i5-6500 4GB 128GB 3×PCIe(×4) DIO and Analog、(MLC) ~20233×PCI motionCATシリーズ
パルス列、DIO
BOX PC( Fun less)
1×PCIe(×8) EtherCAT Motion、BVE58S□□□ Core i5-7500 8GB 3×PCIe(×4) DIO and Analog ~2022
パルス列、DIO
64GB
(MLC)
BVZ58S□□□ Core i5-7500 8GB Slot less EtherCAT Motion、DIO and Analog、 ~2022
BZ04S□□□A Celeron J1900 4GB ~2022
128GB
Panel PC (MLC)
EtherCAT Motion、
P78S□□□A Core i5-6500 4GB 2×PCI DIO and Analog、motionCATシリーズ ~2023
パルス列、DIO
表2. 組込型式
CODESYSランタイム種別 (※1) 組込構成(※2) 予備
第2項文字 (2文字) 第3項文字 第4項文字
記 号 意 味 記 号 意 味 記 号 意 味
0 Controlのみ CPD CPD578N、CPD678N A
1 TV DIO DIO580 or DIO680 B
2 WV CTR CTR664F C
4 SM MCT MCAT520M D
8 SMCNC EC EtherCAT E
※1. ORする。 例. TV + SMの場合は”5”。 WV + SMの場合は”6”
※2. 複数組み込みの場合、続けて記載。 例. CPD + DIOの場合、CPDDIO
上記の□□□は組み込み型式
例. CODESYS PLC + TV + SoftMotion + CNCの場合、 □□□=9EC
4
Page7
Motion-control Software Products
HCOS: ソフト(Runtime)選定
PLC Runtime(Controller)
基本となるソフトウェアPLC
HCOSの組み込み製品が弊社拡張カードのみの場合はPLCランタイムのみで運用可能
HMI Runtime
Target Visualization(略称:TV) Web Visualization(略称:WV)
HCOS本体から画面出力する場合 Web端末をHMIにする場合
ディスプレイポートからモニタへ出力 Webサーバーとして使用
上記から選択します(両方選択可能)
EtherCATマスタースタック
EtherCATを使用する場合必要
ソフトウェアモーション(略称:SM)
EtherCATを使用したモーション制御をする場合に必要
PLCopen Part Ⅰ、Ⅱ、Ⅲの機能が利用可能
Power, Reset, ReadStatus, ReadMoveStatus, ReadAxisInfo, ReadActualPosition, ReadActualVelocity,
SetPosition, MoveVelocity, MoveRelative, MoveAbsolute, Stop, SetOverride, Jog, etc.
ソフトウェアCNC(略称:CNC)
EtherCATを使用した補間制御やロボティクス、Gコードを使用する場合に必要
PLCopen Part Ⅳの機能が利用可能
各種機構設定
GroupReset, GroupEnable, GroupDisable, MoveCircularRelative, MoveCircularAbsolute,
MoveLinearRelative, MoveLinearAbsolute, GroupStop, etc
5
Page8
Motion-control Network Products
HCOS: モーション機能の特長
CNC機能、Gコード対応
Gコードエディタ
自由曲線 と形状表示
微小線分の連続実行による
Z 自由曲線補間が可能
X
Y
ロボティクス・インバースキネマティクス(逆運動学)
機構設定、2~3軸スカラー制御等
以下の機構に対応できるように設計 極座標
されています。開発環境から機構定
義を行い、プログラムからアプリケ
ーション座標を指定した位置決めが
できます。
2軸スカラー 3軸スカラー
パルスカウンタトリガー出力
指定座標通過時出力
(トリガー出力) 1ショット出力 1000パルス毎にトリガー出力
position position
4000
3000
2000
1000 1000
t t
Trigger Trigger
output output
6
Page9
Motion-control Network Products
EtherCAT
Open Network system
オープン規格
メーカーに依存しない共通規格(互換性)
高速
実効サイクルタイム 250μs~1ms
高い同期性
同期クロックによるノード間の正確な同期
システム情報の授受
セーフティ情報、保守情報も速度を損なわず運用
多様なトポロジー
幅広い用途
7
Page10
Motion-control Network Products
EtherCAT 紹介:EtherCATとは
EtherCAT(Ethernet for Control Automation Technology)は、ドイツ ベッコフオートメーションにより開発されたオープン規格の
リアルタイムイーサネット。EtherCATの仕様は“EtherCAT Technology Group(略称:ETG)”により管理されています。
■EtherCATの構成
EtherCAT busは、マスタ システムと標準のLANケーブルで接続されるスレーブ機器で構成されます。
スレーブは各メーカ製サーボ、各メーカ製 I/O機器
スレーブ♯1 スレーブ♯2 スレーブ♯3 スレーブ♯4 …… スレーブ♯N
ハイバーテック
製品 HES-C400 ハイバーテック
製品
パルス列
ドライバ HES-M400 HES-F400
EtherCAT
サーボ I/O
マスタPCまたはPLC
スイッチ、
センサ等
サーボモータ 2相 5相 サーボモータ
ステッピングモータ ステッピングモータ ステッピングモータ
EtherCAT 紹介:マスタの機能
ETGの規格:ETG.1500の中でマスタ機能を定義しています。 基本的な EtherCAT マスタ構造
EtherCATマスタの代表的機能 Motion Control Cable Hot Connect
機 能 Class A Class B RedundancyTrajectory Generator
●プロセスデータ通信 必要 必要
CSP、CSV(CiA402) マスタ拡張機能(Feature Packs)
●メールボックス通信(CoE *1) 必要 必要
●メールボックス通信(EoE *2) 必要 --
●通信の同期機能*3 必要 -- PDO(IN/OUT) Mail Box(IN/OUT)
*1. CoE:CANopen layer over EtherCAT
*2. EoE:Eternet over EtherCAT 同期通信 非同期通信
*3. スレーブ間の同期をとるDC(Distributed Clock)機能を持つ
パケット生成/パケット送受信
EtherCATマスタ基本機能
NIC(Network Interface Controller)
代表的なマスタ製品(他社製品)
名 称 メーカ/取扱店 モーション機能(*4) 備 考
RSI-ECAT-Master (株)マイクロネット Hivertec組込有り リアルタイムOS INtime上で動作するソフトウェアマスタ(C言語のAPI)
NJシリーズ(PLC) オムロン(株) 有り Intel Atom CPUを使用したPLC. ラダーまたはST言語
TwinCAT2、TwinCAT3 Beckhoff Automation GmbH 有り Windows上で動作するソフトウェアマスタ(ソフトウェアPLC)
EC-Master acontis technologies GmbH 有り Windows CE、VxWorks、QNX、RTX、INtime、Linux等上で動作するソフトマスタ
CIFX 50-RE/+ML
CIFX 50E-RE/+ML H ilscher Gm bH (通信マスタ) PCI、PCIexpressのマスタ通信カード(C言語のAPI)
CCRN-EtherCAT Master (株)フリーステーション リアルタイムOS QNX上で動作するソフトウェアマスタ(C言語のAPI)
*4. モーション機能はマスタ拡張機能の1つ、他にケーブル冗長性機能、スレーブ稼動中の取り外し機能などあり
EtherCAT 紹介:Hivertecのマスタ製品
ハイバーテック EtherCATマスタ製品は下表の通りです。
名 称 型 式 備 考
Windows用 HLS-ECAT02 xx/Win INtime、RSI-ECAT-Master、RSI-ECAT-Studio (※)、
HLS-ECATモーション制御ソフトウェア (xx :軸数 08~32) 開発環境は Microsoft Visual Studio と INtime SDK が必要
RSI-ECAT-Master用 HLS-ECMC01xx/RSI RSI-ECAT-Studio、
モーション制御ライブラリ (xx :軸数 06~64) 開発環境は Microsoft Visual Studio(VC ++、VC♯、VB)
HCOSシリーズ PCベースソフトウェアPLC
開発環境は CODESYS 統合開発環境(無償)
※ RSI-ECAT-Master用のENIファイル(EtherCATのスレーブ構成ファイル)を作成するソフトウェア
8
Page11
Motion-control Software Products
HLS-ECMC01/RSI シリーズ モーション制御用 ライブラリ(RSI-ECAT-Master用)
モーション制御はECMCライブラリから、
その他のI/O制御は直接RTOS INtimeで制御 ■型式:HLS-ECMC01xx/RS(I xxは制御軸数)
■OS:Intime 4.2、5.1
■マスタ:RSI-ECAT-Master/DC、RSI-ECAT-Master/RED
User Application(INtime SDKで開発) ■対応 NIC(Network Interface Controller)
Intel、Realtek(詳細はお問い合せください)
モーション制御 I/O制御
■開発環境:上記OSに対応したINtime SDK、DKA
HLS-ECMC01xx/RSI ■Motion API 国際標準PLCopen
Trajectory MC_Power パワーオン/オフMotion API Generator MC_Home 原点復帰
MC_MoveVelocity 速度制御
MC_MoveAbsolute 絶対値位置決め
MC_MoveRelative 相対値位置決め
etc.
RSI-ECAT-Master ■接続確認済ドライブ
EtherCAT EtherCAT対応CiA402ドライブ(cspモード、hmモード実装)
パナソニック(株)製 MINAS-A5Bシリーズ、A6Bシリーズ
オムロン(株)製 G5 Series、1Sシリーズ
EtherCAT EtherCAT オリエンタルモーター(株)製 AZシリーズ
サーボ サーボ I/O 山洋電気(株)製 SANMOTION R
(株)日立産機システム製 ADV Series
スイッチ、センサ等 LS Mecapion(韓国製) L7N Series
…いずれもEtherCAT対応型式のみ
EtherCATサーボドライブが制御対象
HLS-ECAT01/Win Windows用 EtherCAT モーション & I/O 制御ソフトウェア
マスタ拡張機能(Feature Packs) モーション制御も I/O制御も WindowsのもとRTOSが実行
■開発環境
User Application(Visual Studio VC、VB、VC#で開発) Visual Studio 2008以降(VC、VB、VC#)
■API
・MotionAPIはHLS-ECMC と同等
・MC_MoveLinearAbsolute 絶対値 直線補間
HLS-ECAT01xx/Win ・MC_MoveLinearRelative 相対値 直線補間
・MC_MovePath 指定座標 連続直線補間(自由曲線)
Windows用I/Fモジュール
EtherCATマスタ基本機能 ・IO_Inp IO入力ポート読出し
・IO_Outp IO出力ポート書込み
・EC_GetDiagnosisMessage スレーブの診断メッセージ取得
etc.
■接続確認済サーボドライブ
Motion API Trajectory HLS-ECMC01xxと同じGenerator
■接続確認済みスレーブ
●ディジタル入出力
Beckhoff Automation GmbH製
EL1xxx、EL2xxx(xxxは仕様により異なる)
オムロン(株)製
RSI-ECAT-Master GX-ID1611 デジタル2段端子台 16点入力スレーブ
GX-MD1611 デジタル2段端子台 8点入力/8点出力スレーブ
GX-OD1611 デジタル2段端子台 16点出力スレーブ
WAGO Kontakttechnik GmbH & Co.KG製
EtherCAT 750-354 EtherCAT(R) Coupler
750-400 2-Channel Digital Input Module DC24V
EtherCAT EtherCAT 750-501 2-Channel Digital Output Module DC24V
サーボ サーボ I/O 750-600 End Module
●アナログ入出力
スイッチ、センサ等 Beckhoff Automation GmbH製
EL3xxx、EL4xxx(xxxは仕様により異なる)
EtherCATスレーブが制御対象 オムロン製
GX-AD0471 アナログ4点入力スレーブ
GX-DA0271 アナログ2点出力スレーブ
●その他
■型式:HLS-ECAT01xx/Win(xxは制御軸数) ハイバーテック製
■OS:Windows7(32/64bit)、Windows8(32/64bit) HES-C400 パルス指令スレーブ
■対応 NIC(Network Interface Controller) HES-M400 2相ステッピングモータドライバ
Intel、Realtek(詳細はお問い合わせください) HES-F400 5相ステッピングモータドライバ
9
Page12
HES-C400 4軸パルス指令 EtherCAT スレーブ
■特徴 HES-C400
Link/Act
●スレーブ内に4軸モーションコントローラを形成 OUT
J1
Link/Act
●位置決め、2~4軸直線補間、2軸円弧補間、原点復帰機能をスレーブ内で処理 DIN35LIN
●マスタ内のモーションマスタは処理簡単構造 RUN
5V
H
●スレーブ内補間品質はマスタの影響を受けない
L
●パルス列指令はモータドライバメーカ選択自由 ERR 4AxisStepper/Servo
24V I/F
GND DINレール取付
●弊社モーションボード「CPDシリーズ」から乗り換え容易 EtherCATHivertecMade in Japan (標準)
HES-C400 仕様
●制御仕様 ●入出力信号
指令方式 パルス指令 マシンインターフェース 各軸に±ELS、OLS、DLS入力あり
軸制御 4軸 独立位置決め、同時2~4軸直線補間、同時2軸円弧補間 (全てカプラ絶縁)
連続送り時指令範囲 無制限 サーボインターフェース
位置のオーバライド 位置決め制御でのみ可能 指令出力 差動ドライバ出力
速度レンジ 0.1pps ~ 6.5Mpps エンコーダ受け周波数はMax.4Mcps(4逓倍時) エンコーダ/パルサ入力 あり(ただし、2者択一)
速度オーバライド 可能 入力 サーボアラーム、インポジション
(各軸)(全てカプラ絶縁)
線速度一定制御 2軸円弧、直線補間は√2 3軸、4軸 直線補間は√3制御
サーボON、偏差カウンタクリア
加減速 S字、部分S字加減速、直線加減速 ただし、円弧補間時は周速一定制御なし 出力 (各軸)(全てカプラ絶縁)
原点復帰 センサ原点、Z相原点、ELS兼用原点の各々に対して13通りの原点復帰可能
●HES-C400 手配案内
●供給電源 周囲環境 1 パルス指令スレーブ HES-C400
電 源 DC+24V 1.3A(typ. 0.3A) 2 パルス指令スレーブ NJ用 HES-C400/NJ
温度条件 0~40℃(結露なきこと) 3 コネクタボード ACB-HU1004/ *
* :ケーブルコネクタタイプ * = DR(ライトアングル)
* = DS(ストレート)
(形寸:アクセサリボード参照) * = DS(D)( DIN台付)
HES-C400 接続案内 4 ケーブル HCL-051W
サーボモータまたは
CW CCW
○ ○ パルスモータ+ -
モータ
外部 I/O用
24V 電源 +ELS DLS OLS -ELS エンコーダ
マスタPC
通信ケーブル ドライバアンプ
xCWP
xCWN 指令パルス CW
xCCWP
xCCWN 指令パルス CCW
スレーブ用 xAP
電源 xAN
A相
xBP
xBN B相
xZP HES-C400 外形寸法
コネクタボード xZN Z相GND
HES-C400 ACB-HU1004/* +24V GND 40 103.25
xSVON サーボ ON サー
HES-C400
xSVRST サーボ リセット ボ
Link/Act イ HES-C400偏差カウンタ
OUT xSVCTRCL クリア ンタ
Link/Act
J1 xSVALM ー
Link/Act OUTサーボ アラーム フ
IN xINPOS ェ
J1
ー Link/Act
G24 位置決め完了 ス IN
RUN
5V
H ケーブル RUN
5V
L HCL-051W H
ERR 4Axis
Stepper/
Servo
24V I/F L
GND
ERR
EtherCAT 4Axis
Hivertec Stepper/Servo
Made in Japan 24V I/F
GND
EtherCAT
Hivertec
Made in Japan
側面図 DINレール
別の または 取付器具
HES-C400 他スレーブ
10
ID
115
ID
ID
57.5
Page13
Motion-control Network Products
HES-M400 2相マイクロステップ モータ ドライバ EtherCAT スレーブ
■特徴 HES-M400
Link/Act OUT
SENSOR
●スレーブ内に 4軸モーションコントローラ内蔵 -OLDL-EL
+EL
Link/Act 24V
●位置決め、2~4軸直線補間、2軸円弧補間、原点復帰機能をスレーブ内で処理 ETIM
POW
IN ALM
●マスタの性能によるモーション制御の影響小 RUN ETIM :Excitation timing5V
H
●弊社モーションボード「CPDシリーズ」から乗り換え容易 MOTOR/BL B
/A
ERR A
エンコーダを接続することで、脱調検出/脱調レス/押し当て原点復帰モードが使用可能 壁面取付タイプ● (標準)
Made in Japan
HES-M400 仕様
●ドライバ仕様 脱調検出機能付き 2相マイクロステップ・ドライバ ●制御仕様
型 式 HES-M410 HES-M420 HES-M430 HES-M440 軸制御 4軸 独立位置決め
軸 数 1軸/スレーブ 2軸/スレーブ 3軸/スレーブ 4軸/スレーブ 同時2~4軸直線補間、同時2軸円弧補間
駆動方式 バイポーラ結線(結線によりユニポーラも接続可能) 位置のオーバライド 位置決め制御でのみ可能
駆動相電流 0.5~2(A/相) 速度オーバライド 可能
モータ駆動電圧 DC15V~28V 線速度一定制御 2軸円弧、直線補間は√2
3軸、4軸 直線補間は√3制御
分割数:(一般分割数) 1、2、4、8、16
加減速 S字、部分S字加減速、直線加減速
5相互換分割数 2.5(1)、5(2)、10(4)、12.5(5)、25(10)
ただし、円弧補間時は周速一定制御なし
( )は5相換算 50(20)、62.5(25)、80(32)、125(50)、250(100)
原点復帰 センサ原点、Z相原点、ELS兼用原点の
最大応答周波数 指令:2Mcps 各々に対して13通りの原点復帰可能
主な機能 エンコーダ:80Kcps ●入出力信号 リミットセンサ入力(±ELSE、DLS、OLS)
脱調検出出力
●脱調レスおよび脱調検出機能
脱調レス/脱調検出モードで使用した場合はエンコーダが必要です <通信で設定できるパラメータ>
・動作モードを通信で適宜変更可能 動作モード設定 オープンループ/脱調検出/
・脱調検出すると、コネクタより信号出力 脱調レス&通常原点復帰/
・押し当てにより、原点センサ無しで原点復帰可能 脱調レス&押当て原点復帰)
接続可能なエンコーダ ・分解能200パルス/回転のものを接続可能 その他の設定 分割数設定、出力電流設定、自動カウントダウン値設定
・差動出力、オープンコレクタ出力タイプに対応 アラーム要因読み出し (過電流、過電圧、オーバーヒート等)
●適合モータ ●型式案内
・定格相電流 0.5A~2A B相 B相 標準仕様 HES-M4x0
・モーターリード線が4、6、8本のB相 B相
A相 A相 オムロンNJ仕様 HES-M4x0/NJ2相ステッピングモータが適合 A相 A相
4本線モータ 6本線モータ (x:軸数 1~4)
HES-M400 外形寸法
40.0 68.0 68.0 96.0 102.0
1軸 HES-M410 2軸 HES-M420 3軸 HES-M430 4軸 HES-M440 側面図
11
115.0
ID
GND 24V
135.0
Page14
Motion-control Software Products
HES-F400 5相マイクロステップ モータ ドライバ EtherCAT スレーブ
■特徴
●スレーブ内に 4軸モーションコントローラ内蔵
●位置決め、2~4軸直線補間、2軸円弧補間、原点復帰機能をスレーブ内で処理
●マスタの性能によるモーション制御の影響小
●弊社モーションボード「CPDシリーズ」から乗り換え容易
HES-F400 仕様
●ドライバ仕様 脱調検出機能付き 5相マイクロステップ・ドライバ ●制御仕様
型 式 HES-F410 HES-F420 HES-F430 HES-F440 軸制御 4軸 独立位置決め
軸 数 1軸/スレーブ 2軸/スレーブ 3軸/スレーブ 4軸/スレーブ 同時2~4軸直線補間、同時2軸円弧補間
駆動方式 ペンタゴン結線 位置のオーバライド 位置決め制御でのみ可能
駆動相電流 0.5~2(A/相) 速度オーバライド 可能
モータ駆動電圧 DC15V~28V 線速度一定制御 2軸円弧、直線補間は√2
3軸、4軸 直線補間は√3制御
1、1.5、2、2.5、3、4、5、6、8、10、12、12.5、16、20、
分割数:(一般分割数) 加減速 S字、部分S字加減速、直線加減速
24、25、30、32、40、48、50、60、64、80、100
ただし、円弧補間時は周速一定制御なし
最大応答周波数 指令:500kpps
原点復帰 センサ原点、Z相原点、ELS兼用原点の
各々に対して13通りの原点復帰可能
●適合モータ
●入出力信号 リミットセンサ入力(±ELSE、DLS、OLS)
・定格相電流
L励磁:0.3~1.5A/相 ●
H励磁:0.15~0.75A/相 型式案内
標準仕様 HES-F4x0
・モーターリード線が5、10本の5相ステッピングモータが適合
オムロンNJ仕様 HES-F4x0/NJ
(x:軸数 1~4)
HES-F400 外形寸法
37.0 52.0 66.0 80.0 110.0
1軸 HES-F410 2軸 HES-F420 3軸 HES-F430 4軸 HES-F440 側面図
HES-C400 HES-M400 HES-F400 各シリーズ用ライブラリ(添付)
マスタ マスタメーカ ライブラリ名称 ライブラリ型式 備 考
CODESYS 3S CODESYS用HCOSシリーズ ライブラリ HLS-C400/CODESYS
HCOS((株)ハイバーテック)
HF-W/IoT((株)日立製作所)
NJシリーズ オムロン(株) NJ用 HLS-C400/NJ v2 開発環境 Sysmac Studio
(*6)が必要
HESシリーズ ライブラリ PLC open ファンクションブロック仕様
TwinCAT2 Beckhoff TwinCAT2用 HLS-C400/TC2 開発環境 Visual Studioが必要
Automation HESシリーズ ライブラリ CPDシリーズ関数仕様
TwinCAT3 GmbH TwinCAT3用HESシリーズ ライブラリ HLS-C400/TC3
開発環境 Visual Studioが必要
CPDシリーズ関数仕様
CIFX 50-RE/+ML Hilscher CIFX用 開発環境 Visual Studioが必要
CIFX 50E-RE/+ML GmbH HESシリーズ ライブラリ HLS-C400/CIFX-Win CPDシリーズ関数仕様
*6. NJシリーズ用統合開発環境
12
115.0
Page15
Motion-control Network Products
すばやいレスポンス
センサ系I/Oも パルス入力
減配線 ドライバ
motionCAT
もうひとつのMotion-control Network
はやいうごき
即応性が要求されるシステムに最適
つかいやすい
サーボモータ、パルスモータを問わず、
モータの選択が自由
つなぎやすい
期待通りの結果
つくりやすい
導入立上げが容易、かつ
スレーブの分散配置、追加拡張性大
13
Page16
motionCATシリーズ 紹介
■特 徴
減配線システムです。実効的に最速のレスポンスです。
速いモーションを必要とする装置内の制御機器実装の合理化に推奨します。
■基本性能
省スロット・減配線・装置内に最適 制御し易いソフトウェア
●系統当たり:50m/32モジュール(32子局) ●対応OS:Windows および RTOS(QNX、INtime)などOSに
●モータ制御、軸センサ、制御信号線を減配線 ついてはホームページを参照、またはご相談ください
●ケーブルは市販のLANケーブル ●CPDシリーズ準拠ドライバ関数、ライブラリ、サンプルソフト
伝送性能 ●通信を意識しないシステム構築ができます
通信速度:20Mbps Max. ●● 弊社標準CPDシリーズの扱いがあれば容易にソフト構築
●モジュール数(子局数):32 Max./系統
●通信周期:右表参照(サイクリック通信時の例) モジュール数 32 16 8
●通信ケーブル:CAT5e、以上(何れもシールド付き)
●ケーブルコネクタ:LANコネクタ(RJ45) 時 間 0.49ms 0.24ms 0.12ms
マスタ・スレーブ構造
■motionCAT(減配線システム) ♯1 系統 マスター側
ロープロファイル
PCI express bus
PCI bus
モジュール 31~32 モジュール 27~30 モジュール 1~3
スレーブ♯N スレーブ♯N-1 スレーブ♯1
compact
ケーブル全長 50m モジュール 最大 32/系統 PCI bus
♯2 系統
PC/104
USB接続
●モーション・モジュールなら最大32軸(1系統当たり)
●DIOモジュールなら最大2048点(アナログモジュール混在可能)
スレーブ構造
スレーブが伸縮自在で異なる機能を配置できます。 スレーブが分散して配置できます。
1.スレーブはモジュールが1枚~6枚で構成されます。 1.制御負荷の付近にコントローラを分散できます。
2.モジュールには、モーション、DIO、AIO(DA、AD)があります。 2.装置の増設、追加仕様に対応が容易になります。
3.スレーブには異種のモジュールを混在できます。
型式例:HMG-C2D1A1 P2(2軸モーション)+D1(16in/16out)+A1(4AD/4DA)
スレーブは増設構造です。
2モジュール 1モジュール 1モジュール
1スレーブが4モジュール構成の例
(H)115mm
分解すると……
通信を受け持つベーススレーブ (D)100mmスレーブ (W)14mm
14
Page17
Motion-control Network Products
マスタとスレーブ型式の配線案内
●PCIe、PCI、cPCI マスタは、2系統のLANケーブルに ●PC/104マスタは、1系統のLANケーブルに
HMGスレーブが接続できます。 HMG スレーブが接続されます。
HMG HMG
PCIe、PCI、cPCI PC/104 HMG HMG HMG
マスタボード マスタボード
HMG HMG
●USB接続は、1系統のHUGスレーブが接続されます。 USB LANケーブルケーブル
HUGの後続にHMGスレーブが置かれます。 HUG HMG HMG HMG
マスタ仕様概要
PCI Express( Low profile) PCI compact PCI PC/104 USB I/F
HPCIe-MCAT620M HPCI-MCAT520M HCPCI-MNT720M HPC104-MCAT110M HUG スレーブ(USB)
仕 様 PCI Express PCI compact PCI PC/104 USB I/F
(Low profile)
型 式 HPCIe-MCAT620M HPCI-MCAT520M HCPCI-MNT720M HPC104-MCAT110M HUG スレーブ(USB)
系 統 数 2系統 2系統 2系統 1系統 1系統
モジュール数(子局数) 64モジュール/2系統 64モジュール/2系統 64モジュール/2系統 32モジュール/1系統 32モジュール/1系統
通 信 仕 様 な ど 通信速度:20Mbps 方式:半2重通信 IF:RS-485 接続方式:マルチドロップ PC側との通信USB2.0
伝 送 路 / 距 離 LANケーブル(CAT5e または CAT6 規格以上、シールド付) 50m/系統
通 信 手 順 サイクリック通信(データ通信の介入あり)
付 加 ポ ー ト DIOポート4in/4out あり DIOポート8in/8out あり
そ の 他 非常停止はフルハイパネル
安 全 機 能 断線 検出、 断線検出、非常停止 断線検出 断線検出、非常停止 断線検出
非常停止(オプション)
注)非常停止付はFull highパネルとなる
ソフトウェア案内
デバイスドライバ Windows用 API 関数
マスタボード用およびHUGベーススレーブ用の CPDシリーズ(モーションコントロールボード)からのソフトウェア移
各種Windows、RTOSなどについてはご相談く 行が容易です。
ださい。 ●ドライバ関数…ローレベルな入出力用関数、DLLで提供されるの
サンプルプログラム でVisual Studio以外の開発環境(C ++ Builder
各モジュールサンプルプログラムはVC、VC#、 等)でも利用可能。
VBのサンプルプロジェクト Visual Studio開 ●ライブラリ関数(ソースコード付)
発環境であれば容易に開発できる。 初 期 設 定…原点復帰、マシンI/F、サーボI/F 等設定
動 作 設 定…動作モード、各速度、加減速レート、移動量 等設定動作確認用ソフトウェア 状 態 読 出…動作状態読出、センサ状態読出、
「動かしてみる」…各モジュールの動作確認がで 現在位置カウンタ読出、指令速度 等読出
きる。 制 御 指 令…単軸スタート/ストップ、複数軸スタート/ストップ、
SVON、SVRST 等出力制御
15
Page18
型式指定案内
スレーブ型式指定(モジュール構成表記) モジュール数 モジュール略号 記 事
C モジュール 1軸位置決め補間
HMG-( Cn)(Vn)(Tn)(Dn)(In)(On)(An)(Bn)(Rn)(Sn) V モジュール 2軸位置決め補間
T モジュール DIO 24in/8out
HMG モジュール指定( )は選択記入
ベーススレーブ D モジュール DIO 16in/16out
例:HMG-C3D2A1
(C 3枚、 D 2枚、 A 1枚) nの合計 I モジュール DI 32in
1~6
ただし O モジュール DO 32out
Wモジュール A モジュール ADC 4ch/DAC 4ch
はnの合計
1~3
HUG-( Cn)(Vn)(Tn)(Dn)(In)(On)(An)(Bn)(Rn)(Sn) B モジュール 4-20mA電流ループ ADC 4ch/DAC 1ch
R モジュール ABS エンコーダ読み取り(安川、山洋)
HUG モジュール指定( )は選択記入
USB接続 S モジュール ABS エンコーダ読み取り(パナソニック)
ベーススレーブ 例:HUG-C3D2A1
(C 3枚、 D 2枚、 A 1枚) M モジュール 2相ステッピングモータ ドライブ
F モジュール 5相ステッピングモータ ドライブ
HMGベーススレーブ
モ ジ ュ ー ル 名 称 仕 様
HMGベーススレーブ
HMGベーススレーブは、HM-GN00G通信モジュールがベースとなり、
LANケーブルコネクタによる信号の授受を行います。
【構成品】
・モジュール一式(HM-GN00G)
・フレーム2式 【機 能】
・サイドプレート2式 HM-GN00GおよびHM-GU00Tには
・DIN取付具 ともに次の機能があります。
(1)スレーブの先頭モジュールアドレス
HUGベーススレーブ 設定SW
(2)通信表示
HUGベーススレーブは、HM-GU00T USB接続モジュールがベースと (3)LANケーブル終端抵抗のON/OFF SW
(4)+24V電源入力端子
なり、USB接続コネクタによる信号の授受を行います。
【構成品】
・モジュール一式(HM-GU00T)
・フレーム2式
・サイドプレート2式
・DIN取付具
16
Page19
Motion-control Network Products
HMG、HUG用モジュール
モジュール名称 特 徴 仕 様
1軸位置決め補間 C モジュール ●スレーブ内で補間演算を行う方式に 【通信仕様】
よりスレーブ(モジュール)数によらず アドレス:Cは1モジュール占有、Vは2モジュール占有
正確な補間動作が得られる 通信モード:コマンド指令はデータ通信
●位置に対するプリバッファにより滑ら MAINステータス読取りはサイクリック通信
サーボ I/Fコネクタ かな直線近似による曲線動作が可能 (0.5ms/32モジュール)
36pin MDR
サーボ I/Fコネクタ 【基本仕様】
マシン I/Fコネクタ モジュール側:10236-52A2PL ※Vモジュールは、Cモジュール×2軸モジュール
10pin MIL マシン I/Fコネクタ(オムロン) 制御軸:n軸位置決め、n軸直線補間、2軸円補間×(n/2)組
モジュール側:XG4A-1034 ただし、nは1スレーブ内にCモジュールをn個使用時 n≦6
+24V コネクタ ケーブル側:XG4M-1030-T 指令方式:位置パルス列指令(CW/CCWまたは共通パルス+方向)
位置範囲:-227~+2 27-1(連続送りは無限)
位置のオーバーライド:位置モードでのみ可能
2軸位置決め補間 V モジュール ●パルスモータ制御に経済的 速度レンジ:0.1pps~6.6Mpps 速度オーバーライド:可能
線速度:補間時線速度は全軸中の最長軸に対し√2制御も可能
●Cモジュール2軸分を1モジュールに 加減速:自動加減速 直線、S字、部分S字
収納した省スペースタイプ
【機能仕様】
JI、J2 コネクタ:Molex 12Pin
パルスモータ I/F 原点:センサ原点、ELS兼用原点、エンコーダ原点モジュール側:55959-1230
(コネクタ2軸分) マシン I/F:±ELS、DLS、OLS(全てカプラ絶縁)ケーブル側:
J1、J2 Molex 12Pin サーボ I/F:サーボアラーム、インポシション、サーボレディ、 ハウジング 51353-1200 サーボON、サーボリセット、偏差カウンタクリア
コンタクト 56134-9000
(全てカプラ絶縁)
マシン I/Fコネクタ エンコーダ入力:A、B、Z相 Max.4Mcp(s 4逓倍時)
J3 Molex 12Pin J3 コネクタ:Molex 12Pin
モジュール側:53426-1210
+24V コネクタ ケーブル側:
ハウジング 51103-1200
コンタクト 50351-8100
Digital 24in/8out T モジュール ●Tモジュールは 24in/8out の 【通信仕様】
DIOモジュール アドレス:1モジュール占有
通信モード:サイクル通信(0.5ms/32モジュール)
●Tモジュール用のコネクタボード
(ACB-TH1204またはACB-TH2408) 【仕 様】
を使用して機械まわりの、センサ、 入力24点 出力8点
60pin DIOコネクタ アクチュエータに信号分配できる (入力は6軸分の軸センサ入力あるいは汎用DIとしてシェア可能)
DIOコネクタ: カプラ受け入力電圧:12V~24VDC
フラットケーブルコネクタ( ヒロセ) カプラ電流:8mA以下/点
+24V コネクタ モジュール側: 出力負荷電圧:12V~24VDC
プラグ HIF6-60PA-1.27DS(71) 定格負荷電流:100mA 以下/点
ケーブル側:
ソケット HIF6-60D-1.27R
Digital 16in/16out
D モジュール ●80pin コネクタ PIN 配列は3線式 【通信仕様】
eCON ソケットに対応している アドレス:1モジュール占有
通信モード:サイクル通信(0.5ms/32モジュール)
【仕 様】
DIOコネクタ: 入 力:16点 フォトカプラ絶縁
80pin DIOコネクタ フラットケーブルコネクタ(ヒロセ) 出 力:16点 フォトカプラ絶縁 オープンコレクタ出力
モジュール側: 入力回路:動作電圧 12V~24VDC 応答時間 1mS以内
プラグ FX2B-80PA-1.27DSL カプラ電流 8mA以下/点 入力抵抗 4KΩ
+24V コネクタ ケーブル側: 入力論理:フォトカプラON時 '1'
ソケット FX2B-80SA-1.27R 出力回路:定格負荷電圧 12V~24VDC
(ロック付) 定格負荷電流 80mA 以下/点
出力論理:論理 ’1’ 書込み出力ON
17
Page20
HMG、HUG用モジュール
モジュール名称 特 徴 仕 様
Digital 32in I モジュール 絶縁型ディジタル32点入力 【通信仕様】
アドレス:1モジュール占有
通信モード:サイクル通信(0.5ms/32モジュール)
DI コネクタ:40pin 【仕 様】
フラットケーブルコネクタ(オムロン) 入 力:32点 フォトカプラ絶縁DI コネクタ 入力回路:動作電圧 12V~24VDC 応答時間 1mS以内
40pin MIL モジュール側:
プラグ XG4A-4034 カプラ電流 8mA以下/点 入力抵抗 4KΩ
ケーブル側: 入力論理:フォトカプラON時 '1'
ソケット XG4M-4030-T
Digital 32out O モジュール 絶縁型ディジタル32点出力 【通信仕様】
アドレス:1モジュール占有
通信モード:サイクル通信(0.5ms/32モジュール)
DO コネクタ:50pin 【仕 様】
フラットケーブルコネクタ(オムロン) 出 力:32点 フォトカプラ絶縁 オープンコレクタ出力DO コネクタ
モジュール側: 出力回路:定格負荷電圧 12V~24VDC50pin MIL
プラグ XG4A-5034 定格負荷電流 80mA 以下/点
ケーブル側: 出力論理:論理 ’1’書込み出力ON
ソケット XG4M-5030-T
Analog 4in/4out 12bit
A モジュール 【特 徴】 【通信仕様】
●通信サイクルを短縮する便利機能 アドレス:1モジュール占有
【入力部】 通信モード:サイクル通信(0.5ms/32モジュール)
●A/D値範囲監視報告機能はA/D入力
値が規定の範囲内にあるかサイクリッ 【入力仕様】
クに監視、マスターにステータス報告 入力CH:4CH 12bit ADC 入力信号:0~10V
入出力コネクタ 【出力部】 A/D値範囲監視報告機能:ステータスにより0.5ms毎報告
34pin MIL ●D/A値プリセット出力機能は出力コ
マンド指示で0.5ms/CH/32モジュ 【出力仕様】
ール以内にD/A出力可能 出力CH:4CH 12bit DAC 出力信号:0~10V
●D/Aプロファイル自動出力機能は、 プリセット出力機能:
+24V コネクタ
最大15組の連続した「時間ー電圧変 最大15種類のプレセット値をコマンド指示可
化」のD/A出力を実現 D/Aプロファイル自動出力
入出力コネクタ:34pin 指定時間内(t)に
フラットケーブルコネクタ(オムロン) 到達すべき電圧(V)を与え
D/A D/Aプロファイル出力モジュール側: 出力電圧 V1 V 2
プラグ XG4A-3434 V 3 V 4
ケーブル側: V5
ソケット XG4M-3430-T t1 t2 t3 t4 t5 時間
Analog 4in/1out 12bit
4-20 電流ループ B モジュール 【特 徴】 【通信仕様】
●Aモジュールのアナログ入出力が アドレス:1モジュール占有
4~20mAの電流ループ版 通信モード:サイクル通信(0.5ms/32モジュール)
●ただし、ADC 4CH/DAC 1CH
【アナログ入出力仕様】
入出力コネクタ 入力CH:4CH 12bit ADC
34pin MIL 入力信号:4~20mA 電流ループ
入出力コネクタ:34pin 出力CH:1CH 12bit DAC
フラットケーブルコネクタ(オムロン) 出力 信号:4~2 0mA電流ル ープ
+24V コネクタ モジュール側:
プラグ XG4A-3434 上記以外はAモジュールと同じ
ケーブル側:
ソケット XG4M-3430-T
18