


実車のステアリングホイールからタイロッド付きのステアリング・ラックまでを組み込み、実車相当の試験と検証を実現しています。
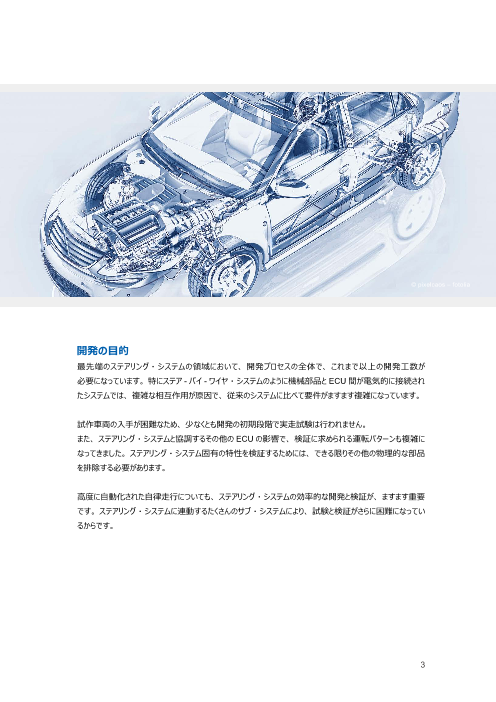
最先端のステアリング・システムの領域において、開発プロセスの全体で、これまで以上の開発工数が必要になっています。特にステアーバイーワイヤ・システムのように機械部品とECU間が電気的に接続され たシステムでは、複雑な相互作用が原因で、従来のシステムに比べて要件がますます複雑になっています。 試作車両の入手が困難なため、少なくとも開発の初期段階で実走試験は行われません。 また、ステアリング・システムと協調するその他のECUの影響で、検証に求められる運転パターンも複雑になってきました。
◆詳細は、カタログをダウンロードしてご覧ください。
このカタログについて
| ドキュメント名 | ステアリング・イン・ザ・ループ・テストベンチ |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 4Mb |
| 登録カテゴリ | |
| 取り扱い企業 | IPG Automotive株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page2
CarMaker®/ HIL による相乗効果
2
Page3
© pixelcaos – fotolia
3
Page4
4
Page5
5
Page6
・ 低振動/振動減衰ベース ・ プレート
・ 電源ラック(電源供給ユニット)
・ 2 つのリニア ・ アクチュエータ
・ ステアリング ・ ホイール ・ アクチュエータ
・ ステアリング ・ ユニット用のガイド/調整ユニット
・ アクチュエータの制御と各状態量の記録用 Xpack4 リアルタイム ・ システム
優れた柔軟性を備えるこのシステムは、 お客様固有のステアリング ・ システムにすばやく簡単に適応します。
すべてのアクチュエータは、 路面反力、 ラック移動量(トラック・ロッドのリニア・アクチュエータ )、 ステアリング・
トルク、 または角度(ステアリング ・ ホイール ・ アクチュエータ ) に応じて個々に制御されます。 各種センサで
計測された状態量と CarMaker® シミュレーション環境を組み合わせることで、 実際のステリング操舵を再現
し、 ステアリング特性の検証が可能なクローズド ・ ループ ・ システムが構築されます。
このステアリング ・ イン ・ ザ ・ ループ ・ システムにおいて、 ステアリング ・ ラック両端にあるリニア ・ モータは、 実
車で走行した際の路面反力を発生する完全なハードウェア・イン・ザ・ループ機能を持っています。 これにより、
革新的なステアリング ・ システムを実車と同等の路面負荷で試験することが可能になります。
ステアリング ・ システムの伝達関数を正確に特定するために、 反力用モータは周波数応答特性の優れたモー
タを選定します。
そのため、 道路のくぼみに起因する外乱、 振動を忠実に再現した試験ができます。 ソフトウェアのリリース試
験を実施するために、 テストベンチに接続された車両シミュレーション ・ モデルにより、 実際のステアリング ・ シ
ステムをバーチャル環境で実車試験可能な環境を提供します。 ドライバのハンドル操作を伴わないオープン ・
ループ試験に加え、 車線変更やニュルブルクリンクのようなサーキット走行などドライバのランダムなステアリング
操舵が必要な試験も、 IPGDriver を使用してシミュレーション環境で実現できます。 実質的にどんなに複
雑な運転操作を伴うクローズド ・ ループ操舵も、 CarMaker® の統合プラットフォームを活用することで極め
て容易に構築できます。 実車試験からテストベンチへの試験へ切り替えることで、 再現可能な路面反力を
作り出すことが出来るメリットももたらされます。
6
Page7
7
Page8
OEM
© fotomek – fotolia
8
Page9
OEM
Tier 1
© fotomek – fotolia
9
Page10
10
Page11
CarMaker®/HIL による相乗効果
最高レベルのオープンな統合を活用
追加 ECU と FailSafeTesterの統合
11
Page12
上記には、 個別に関連する安全規則、 要件、 条約に対する調整は含まれていません。
運用には、 CarMaker® ソフトウェアなどの追加コンポーネント、 または、 電気ステアリング制御ユニットの統合が必要です。
12
Page13
13
Page14
位置制御演算
ステアリング ・ アクチュエータの応答
~ 5ms
スラローム:18m
aymax=8.6 m/s² (車両限界値 )
14
Page15
リニア ・ アクチュエータの応答
スラローム:18m
aymax=8.6 m/s² (車両限界値 )
15
Page16
China | France | Germany | India | Italy | Japan | Korea | Nordics | Turkey | UK | USA
IPG Automotiveは、バーチャル・テスト・ドライビングのグローバルリーダーとして、車両開発向けの革新的なシミュレーション・
ソリューションを開発しています。シームレスな使用を考慮し設計された当社のソフトウエアとハードウエア製品は、概念実証
(POC)から検証またはリリースに至るまで、開発プロセス全般わたって活用できます。ユーザにバーチャル車両全体を使って
新しいシステムの開発とテストを行っていただけるIPG Automotiveのバーチャル・プロトタイピング技術は、自動車のシステムズ
エンジニアリングを促進します。
IPG Automotiveは、ADAS/自動運転、パワートレイン、ビークルダイナミクスという3つのアプリケーション領域でのバーチャル
開発に特化したエキスパートです。当社のCarMaker製品群は、現実に近い環境で、高度に再現された車両モデルを統合す
ることによって、先進運転支援システムと自動運転機能の開発とテストに関連した諸課題に取り組むべく、世界中で使用され
ております。詳細なセンサモデルは、関連する環境で起こりうる影響を考慮しつつ、インフラと道路ユーザといった要素に左右され
る複雑さを有した環境モデルから促され、機能テスト用の現実的なインプットデータを生成します。
IPG Automotiveは、①品質、②徹底したユーザ志向、③効率性、④イノベーションの促進、そして⑤長く続くパートナーシップ
を指針としております。
IPG Automotive 株式会社 〒105-0003 東京都港区西新橋2-9-1 PMO西新橋9F
Phone: +81-3-5826-4301• Email: sales-jp@ipg-automotive.com • www.ipg-automotive.com
© IPG Automotive GmbH, Karlsruhe | 2018