


このカタログについて
| ドキュメント名 | LS ELECTRIC G100クイックスタートマニュアル |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 1.5Mb |
| 取り扱い企業 | 株式会社日本電商 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
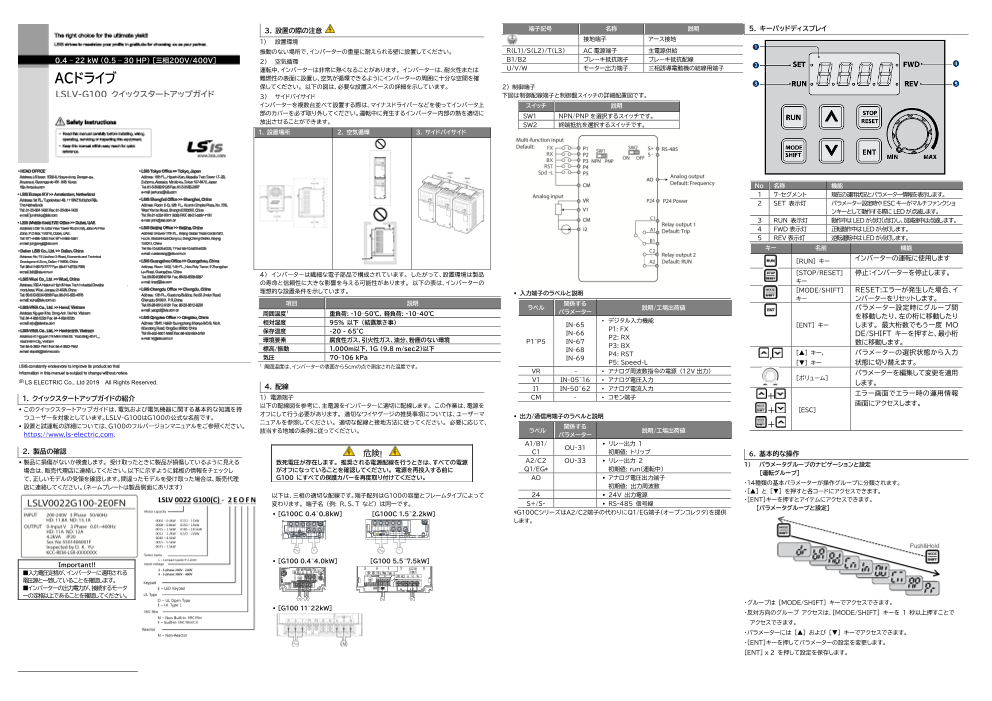
3. 設置の際の注意 端子記号 名称 説明 5. キーパッドディスプレイ
1) 設置環境 接地端子 アース接地
振動のない場所で、インバーターの重量に耐えられる壁に設置してください。 R(L1)/S(L2)/T(L3) AC電源端子 主電源供給
0.4 – 22 kW (0.5 – 30 HP) [三相200V/400V] 2) 空気循環 B1/B2 ブレーキ抵抗端子 ブレーキ抵抗配線
運転中、インバーターは非常に熱くなることがあります。 インバーターは、耐火性または U/V/W モーター出力端子 三相誘導電動機の結線用端子
ACドライブ 難燃性の表面に設置し、空気が循環できるようにインバーターの周囲に十分な空間を確
保してください。 以下の図は、必要な設置スペースの詳細を示しています。 2) 制御端子
LSLV-G100 クイックスタートアップガイド 3) サイドバイサイド 下図は制御配線端子と制御盤スイッチの詳細配置図です。
インバーターを複数台並べて設置する際は、マイナスドライバーなどを使ってインバータ上 スイッチ 説明
部のカバーを必ず取り外してください。運転中に発生するインバーター内部の熱を適切に SW1 NPN/PNPを選択するスイッチです。
放出させることができます。
SW2 終端抵抗を選択するスイッチです。
1. 設置場所 2. 空気循環 3. サイドバイサイド
No 名称 機能
1 7-セグメント 現在の運用状況とパラメーター情報を表示します。
2 SET 表示灯 パラメーター設定時やESCキーがマルチファンクショ
ンキーとして動作する際にLEDが点滅します。
3 RUN 表示灯 動作中はLEDが点灯(点灯)し、加減速中は点滅します。
4 FWD表示灯 正転動作中はLEDが点灯します。
5 REV表示灯 逆転運転中はLEDが点灯します。
キー 名前 機能
[RUN] キー インバーターの運転に使用します
4) インバーターは繊細な電子部品で構成されています。 したがって、設置環境は製品 [STOP/RESET] 停止:インバーターを停止します。
の寿命と信頼性に大きな影響を与える可能性があります。 以下の表は、インバーターの キー
理想的な設置条件を示しています。 [MODE/SHIFT] RESET:エラーが発生した場合、イ
▪ 入力端子のラベルと説明
キー ンバーターをリセットします。
項目 説明 関係する
ラベル 説明/工場出荷値 パラメーター設定時にグループ間
周囲温度1 重負荷: -10–50℃, 軽負荷: -10–40℃ パラメーター
を移動したり、左の桁に移動したり
相対湿度 95% 以下 (結露無き事) • デジタル入力機能
IN-65 [ENT] キー します。 最大桁数でもう一度 MO
保存温度 -20 - 65°C P1: FX
IN-66 DE/SHIFT キーを押すと、最小桁
環境要素 腐食性ガス、引火性ガス、油分、粉塵のない環境 P2: RX
P1~P5 IN-67 数に移動します。
P3: BX
標高/振動 1,000m以下, 1G (9.8 m/sec2)以下 IN-68
P4: RST
気圧 70–106 kPa IN-69 , [▲] キー, パラメーターの選択状態から入力
P5: Speed-L [▼] キー 状態に切り替えます。
1 周囲温度は、インバーターの表面から5cmの点で測定された温度です。
VR - • アナログ周波数指令の電源 (12V出力) パラメーターを編集して変更を適用
LS ELECTRIC Co., Ltd 2019 All Rights Reserved. V1 IN-05~16 • アナログ電圧入力 [ボリューム]
します。
4. 配線 I1 IN-50~62 • アナログ電流入力
1. クイックスタートアップガイドの紹介 1) 電源端子 CM - • コモン端子 + エラー画面でエラー時の運用情報
以下の配線図を参考に、主電源をインバーターに適切に配線します。 この作業は、電源を 画面にアクセスします。
▪ このクイックスタートアップガイドは、電気および電気機器に関する基本的な知識を持
オフにして行う必要があります。 適切なワイヤゲージの推奨事項については、ユーザーマ + [ESC]
つユーザーを対象としています。LSLV-G100はG100の公式な名前です。 ▪ 出力/通信用端子のラベルと説明
ニュアルを参照してください。 適切な配線と接地方法に従ってください。 必要に応じて、
▪ 設置と試運転の詳細については、G100のフルバージョンマニュアルをご参照ください。 関係する +
該当する地域の条例に従ってください。 ラベル 説明/工場出荷値
https://www.ls-electric.com. パラメーター
A1/B1/ ▪ リレー出力 1
OU-31
2. 製品の確認 危険! C1 初期値: トリップ 6. 基本的な操作
▪ 製品に損傷がないか検査します。 受け取ったときに製品が損傷しているように見える 致死電圧が存在します。 推奨される電源配線を行うときは、すべての電源 A2/C2 OU-33 ▪ リレー出力 2
1) パラメータグループのナビゲーションと設定
場合は、販売代理店に連絡してください。以下に示すように銘板の情報をチェックし がオフになっていることを確認してください。 電源を再投入する前に Q1/EG* 初期値: run(運転中)
[運転グループ]
て、正しいモデルの受領を確認します。間違ったモデルを受け取った場合は、販売代理 G100 にすべての保護カバーを再度取り付けてください。 AO ▪ アナログ電圧出力端子
・14種類の基本パラメーターが操作グループに分類されます。
店に連絡してください。(ネームプレートは製品側面にあります) 初期値: 出力周波数
・[▲] と [▼] を押すと各コードにアクセスできます。
以下は、三相の適切な配線です。端子配列はG100の容量とフレームタイプによって 24 ▪ 24V 出力電源
・[ENT]キーを押すとアイテムにアクセスできます。
変わります。 端子名 (例: R、S、T など) は同一です。 S+/S- ▪ RS-485 信号線
[パラメータグループと設定]
▪ [G100C 0.4~0.8kW] [G100C 1.5~2.2kW] *G100CシリーズはA2/C2端子の代わりにQ1/EG端子(オープンコレクタ)を提供
します。
▪ [G100 0.4~4.0kW] [G100 5.5~7.5kW]
Important!!
■入力電圧定格が、インバーターに適用される
電圧源と一致していることを確認します。
■インバーターの出力電力が、接続するモータ
ーの定格以上であることを確認してください。
・グループは [MODE/SHIFT] キーでアクセスできます。
▪ [G100 11~22kW]
・反対方向のグループ アクセスは、[MODE/SHIFT] キーを 1 秒以上押すことで
アクセスできます。
・パラメーターには [▲] および [▼] キーでアクセスできます。
・[ENT]キーを押してパラメーターの設定を変更します。
[ENT] x 2 を押して設定を保存します。
Page2
2) モーター回転方向確認 -速度ポテンショメータ(外付けボリューム)の配線(2: V1, 0-10V)
8. パラメーターリスト
このステップでは、キーパッドを使用して低速でモーターを動かし、モーターの方向を確認 外付けボリュームでインバーターを制御するには、frq=2 を設定し、以下のように
7.よく使う機能 運転グループ
する方法について説明します。 電源を投入する前に、電源とモーターの配線が前の手順 配線します。 PLCなどのコントローラからの 0 ~ 10VDC 電圧信号で周波数入
と一致し、カバーが取り付けられていることを確認してください。 [速度設定] 力する場合は、V1 と CM の配線のみとなります。 1) 多段速周波数 0.00 目標周波数
最初の電源投入時、ディスプレイは「0.00」のようになります。 これは 0.00 Hz の周波 この手順では、インバーターの多段速周波数を設定して使用する方法を示します。 ACC 加速時間
数を示します。 dEC 減速時間
グル コード 名称 セッティング
drv 運転指令方法
VR = 10VDC出力 ープ
Frq 周波数指令方法
VI = ワイパー
St1 多段速周波数 1
CM = コモン 65 P1 機能設定
St2 多段速周波数 2
66 P2 機能設定 7: Speed-L
In St3 多段速周波数 3
67 P3 機能設定 8: Speed-M
[ENT] を押します。 Set のLEDが光ります。 10.00 が表示される - PLCなどのコントローラからの配線(5: I2, 4-20mA) 68 P4 機能設定 9: Speed-H CUr 出力電流
[MODE/SHIFT]x3で まで [▲] を押します。 4-20mA信号入力による速度制御 frq=5. 69 P5 機能設定 Rpm モーター回転数
桁を移動します。 [ENT] x2を押して Speed-L/M/H のデジタル入力は、P1~P5の入力端子に任意に割り付ける dCL インバーターDC電圧
セーブします。
ことにより、1~7速の異なる多段速を定義するバイナリシーケンスとして機能 vOL インバーター出力電圧
nOn 出力指令状態
します。 下記例は、P3=Speed-L P4=Speed-M P5= Speed-H
[設定コマンド] drC 回転方向選択
に割り付けた場合の多段速とビット入力の組み合わせです。
I2 = + 信号
ドライブグループ(dr)
CM = - コモン Output
Frequency 09 制御モード 26 自動トルクブーストフィルタゲイン
Speed7 11 ジョグ周波数 27 自動トルクブーストモータリングゲイン
Speed6
Speed5 14 モーター容量 28 自動トルクブースト回生ゲイン
Speed4 15 トルクブースト方法 91 スマートコピー
drv が表示されるまで [▼]キーを押して設定 周波数表示に戻るには、 Speed3
- 内蔵ボリューム(4: V0)
Speed2 16 正方向トルクブースト 93 パラメーター初期化
[▲]x4 キーを押しま を0に変更します。 次のように [ESC] キ 内蔵ポテンショメータによる速度制御用。 Speed1 17 逆方向トルクブースト 97 ソフトウェアバージョン
す。 [ENT] を 2 回押して ーを押します。 Speed0
18 基底周波数 98 I/Oボードバージョン表示
[ENT]を押すと設定が 設定を保存します。 - [▲] + [▼],
表示されます。 ※これによりRUN/STOP - [▲] + P3 20 最大周波数
キーが運転指令方法として [MODE/SHIFT], ま P4 基本機能グループ(bA)
有効になります。 たは
P5 04 第2運転指令方法 19 入力電源電圧
- [▼] +
05 第2周波数指令方法 20 自動チューニング
[MODE/SHIFT] Fx
10 入力電源周波数 53 多段速周波数4
11 モーター極数 54 多段速周波数5
[方向の確認] 速度 P3 P4 P5 説明
12 定格すべり速度 55 多段速周波数6
モーターを低速で運転しても安全であることを確認してください。 0 - - - Frq の設定に応じた速度
13 モーター定格電流 56 多段速周波数7
準備ができたら、[RUN]キーを押してモーターを動かします。 ディスプレイには、出力周
1 ✓ - - St-1_多段速周波数1
15 モーター定格電圧
波数が 10Hz に達するまで短時間表示されます。 2 - ✓ - St-2_多段速周波数2
4) 加速時間と減速時間の例 拡張機能グループ(Ad)
モーターシャフトを見て、回転方向を確認します。 [STOP/RESET]キーストップを押し 3 ✓ ✓ - St-3_多段速周波数3
・メインディスプレイ (0.00) から [▲] キーを押して、Acc が表示されるように 01 加速パターン (リニア/S-カーブ) 44 ブレーキ開放正方向周波数
ます。モーターの方向が間違っている場合は、[STOP/RESET] キーでモーターを停止 4 - - ✓ bA-53_多段速周波数4
します。[ENT]キーを押すと現在の設定が表示されます。
し、インバーターの電源を切ります。 02 減速パターン (リニア/S-カーブ) 45 ブレーキ開放逆方向周波数
5 ✓ - ✓ bA-54_多段速周波数5
・[▲] および [▼] キーを使用して値を増減します。[MODE/SHIFT]キーで 07 起動方法 47 ブレーキ閉周波数
6 - ✓ ✓ bA-55_多段速周波数6
コンデンサが放電するまで、 カーソルを次の桁に移動します。 08 停止方法 50 省エネ運転
7 ✓ ✓ ✓ bA-56_多段速周波数7
・[ENT] x 2 を押して設定を保存します。Acc が再び表示され、 09 回転禁止方向選択 64 冷却ファン制御
少なくとも 5 分間 待ってください。 パラメーターの変更が有効になったことを示します。
10 電源投入時起動 66 出力接点オンオフ制御方法
2) 電源投入後起動
インバーターとモーターの間の任意の2つの出力配線を入れ替えます。 これにより、モー 20 加速時ドウェル周波数 70 安全運転選択可否
電源喪失後に自動的に起動するか、インバーターの電源が投入されるとすぐに
ターの回転方向が変わります。 同様の手順で正しい回転を確認します。 5) 必要なモーターパラメーター 22 加速時ドウェル運転時間 74 プレス用回生回避機能選択
起動させる場合は Ad-10_Poweron Run=1 に設定します。
3)運転/停止と速度指令方法の設定 ▪ モーター銘板に基づいて、以下のモーターパラメーターを設定します。 24 周波数制限 79 DB ユニット 動作電圧
27 周波数ジャンプ 80 Fireモード選択
[運転指令方法設定] グル コード 名称 セッティング 3) 速度サーチ
ープ
2 線 制 御 (1: Fx/Rx-1) エラー発生時、エラーでトリップさせずにフリーランでモーターを運転したい場合 制御機能グループ(Cn)
0 キーパッド
dr 14 モーター容量 モーター容量の設定 は、エラー発生後の速度サーチを設定する必要があります。 04 キャリア周波数 29 無負荷速度偏差補償ゲイン
1 FX/RX-1
bA 11 極数 モーター極数 (2~12) グル コード 名称 セッティン グループ 09 初期励磁時間 30 速度応答性剛性ゲイン
2 FX/RX-2
12 モーター定格すべり モーター定格すべり(RPM) ープ グ 21 低速トルク補償ゲイン 53 トルクリミット設定方法
3 Int 485
13 モーター定格電流 モーター定格電流(A) _ _ 1 _ エラー発生時初期化 22 出力トルク補償ゲイン 71 速度サーチ運転選択
Cn
4 フィールドバス 71 速度サーチ設定
15 モーター電圧 モーター電圧 (0010) 23 速度偏差補助補償ゲイン 77 エネルギーバッファリング選択
▪ HP から kW への変換チャート 24 速度偏差主補償ゲイン
▪ drv が表示されるまで [▲]x3 キーを押します。 [ENT]を押すと設定が表
示されます。 HP 1/4 1/2 1 2 3 5 7.5 10 1 2 25 3 4) 自動再始動 入力端子台機能グループ(In)
5 0 0 自動再起動機能は、端末(Fx/Rx-1/2)の実行コマンドでのみ動作します。 01 アナログ最大入力時周波数 11 V1最大電圧時出力(%)
kW 0.2 0.4 0.7 1.5 2.2 4.0 5.5 7.5 1 1 18. 2 設定値:Pr-08_自動再起動選択=1、Pr-09_再起動No.、Pr-10_再起動遅延時間 05 V1入力量表示 16 V1回転方向変更
[周波数指令方法設定]
5 1 5 5 2 06 V1入力極性表示 17 V1量子化レベル
0 キーパッド1
▪ モーター極数と同期RPM 07 V1入力フィルタ時定数 65~ P1~P5 端子機能設定
1 キーパッド2
極数 2 4 6 8 08 V1入力最小電圧 ~69 P1~P5 端子機能設定
2 V1
Hz 50 60 50 60 50 60 50 60 09 V1最小電圧時出力(%) 87 多機能入力接点選択 (NO/NC 選択)
4 V0
RPM 3000 3600 1500 1800 1000 1200 750 900 10 V1入力最大電圧 90 多機能入力端子状態
5 I2
モーター銘板が 1750 の場合、bA11_poles=4 および 出力端子台機能グループ(OU)
6 Int 485
8 フィールドバス bA12_モーター定格すべり =50 に設定します。 01 アナログ出力1項目 31 多機能リレー1項目
(定格すべりは、同期 RPM – 銘板RPM の差です) 02 アナログ出力1ゲイン 33 多機能リレー2項目
▪ frq が表示されるまで [▲]x4 キーを押します。 [ENT]を押すと設定が
表示されます。 03 アナログ出力1バイアス 41 多機能出力モニター2項目
04 アナログ出力1フィルター 52 多機能出力接点選択
05 アナログ常数出力1 57 検出周波数
06 アナログ出力1モニター 58 検出周波数幅
通信機能グループ(CM)
01 内蔵型通信インバーターID 03 内蔵型通信速度
02 内蔵型通信プロトコル
応用機能グループ (AP)
詳細マニュアルPID運転を参照ください
Page3
保護機能グループ(Pr)
ストール防止作動およびフラックスブレ
04 負荷量設定 50
ーキング
05 入出力欠相保護 59 フラックスブレーキゲイン値
08 トリップリセット時起動選択 66 制動抵抗使用率
12 速度指令喪失時動作 73 速度偏差エラー
17 過負荷警報選択 78 加熱前警報動作選択
20 過負荷トリップ時動作 79 冷却ファン故障選択
25 過負荷トリップレベル 80 オプショントリップ時作動選択
27 軽負荷トリップ選択 82 LV2 使用選択
31 モーターなしトリップ時動作 87 ファン交換レベル
40 モーター加熱トリップ時選択 91~ エラー履歴1~
41 モーター冷却ファンタイプ ~95 エラー履歴 ~5
45 BX トリップモード 96 エラー履歴削除
トリップ発生時のトラブルシューティング
詳細なトラブルシューティングの解決策については、マニュアルを参照してください。
よくある質問(FAQ)
Q: モーターが回転せず、始動時の出力電流が高すぎます。
原因: 負荷が大きすぎます。 手動/自動トルクブーストを使用し、いくつかのパラメーター
を変更することで解決できます。
解決案:
1 手動トルクブースト dr-16またはdr-17の前方または後方ブーストを徐々に増加
させてください。トルクブーストが大きすぎると、IOL などのト
リップが発生する可能性があります。
2 自動トルクブースト dr-15 を 1にして、dr-26~28の値を合わせてください。
3 始動周波数 わずかにdr-19の始動周波数を上げてください。
(例. 0.5 → 1.0 → 1.5 →2.0Hz)
4 ユーザーV/f パタ bA-07 を 2(ユーザーV/f) に設定すると、用途やモーター
ーン 特性に合わせてユーザーV/fパターンを設定できます。
Q:モーターから異音がします。
解決案: Cn-04のキャリア周波数を少し上げてください。
Q:インバーター動作時に漏電ブレーカー(ELCB)がトリップします。
原因: インバーター運転中に漏れ電流が発生しています。
解決案 1: インバーターを接地してください。
解決案 2: 接地抵抗が200Vクラスで100Ω以下か確認してください。
解決案 3: ELCB の容量を確認し、インバーターの定格電流に従って接続してくださ
い。
解決案 4: Cn-04 キャリア周波数を下げてください。
解決案 5: インバーターからモーターまでのケーブル距離をできるだけ短くしてくださ
い。
Q:インバーターを工場出荷時のデフォルト設定にリセットするにはどうすればよい
ですか?
解決案 : dr-93 を 1(すべてのグループ) に設定し、[ENTER] を 2 回押します。
初期化が完了すると、再びdr-93が表示されます。
Q:モーターの加速または減速にかかる時間を調整するにはどうすればよいですか?
解決案 : ACC と dEC. で時間を設定してください。
Q:モーターの減速中に OV フォルト (過電圧) でトリップしないようにするにはどうす
ればよいですか?
解決案1: dECで減速時間を遅くしてください。
解決案2: Pr-50 で磁束ブレーキを有効にします。 左側の最初のビットをアクティブ
にしてください。
解決案3: 負荷の特性上(垂直負荷など)、DB 抵抗を取り付ける必要がある場合があ
ります。
Q: モーターの加速または減速中に、ドライブが OLT (過負荷) でトリップしないように
するにはどうすればよいですか?
解決案: bA-13 のモーター定格電流と、Pr-20 (過負荷トリップ選択)、
Pr-21 (過負荷トリップ レベル)、および Pr-22 (過負荷トリップ時間) の
モーター過負荷パラメーター設定を確認します。
Q: 公称モーター速度を超えてモーターを動かすにはどうすればよいですか?
A: dr-20 の最大周波数を上げます。 V/f モードでは最大周波数範囲は 400Hz、
センサーレス モードでは 120Hz です。 公称周波数 (50/60 Hz) を超えて動作す
るアナログ入力を使用している場合は、In-01 (Freq. at 100%) でアナログ周波数
設定を変更してください。
Q: インバーターは高調波を生成しますか? もしそうなら、それらは問題ですか?
解決策: すべてのインバーターは、主に5次と 7次の高調波を生成します。 場合によっ
ては、問題が発生する場合があり、高調波によって、トランスの加熱や、ドライブの近く
に設置された他の通信デバイスとの干渉などの問題が発生する可能性があります。 干
渉を低減するために、リアクトル、ノイズフィルタまたはラインフィルタの設置が必要に
なる場合があります。 さらに、キャリア周波数を Cn-04 の最小値に調整すると効果
がある場合があります。