



位置決め・速度制御・トルク制御/モーションコントロール
モーションコントローラ内蔵でシステムの簡素化を実現。
PRモードにより、ドライバとモータだけで小規模装置を動かすことができるACサーボシステムです。
サーボドライバ内部にモーション動作を設定できるPRモードを内蔵。
モーションコントローラや位置決めユニットを使わずに、ドライバとモーターだけで小規模装置を動かすことができます。
PRモードの用途として、エアシリンダーの置き換えがあります。エネルギーロスの多い空気圧が不要となり、省エネ、高速化が可能です。
また、1軸位置決めやインデックステーブルといった装置にもご提案させて頂きたい製品となっております。
ツールソフトにはオートチューニングやオシロスコープなど、使いやすい機能が豊富に準備されています。
自動化、省人化、コストを抑えた設備投資など、様々なご要望にお応えするACサーボシステムです。
このカタログについて
| ドキュメント名 | 光洋電子工業㈱_ACサーボシステム |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 2.4Mb |
| 登録カテゴリ | |
| 取り扱い企業 | 株式会社日本電商 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page2
特長
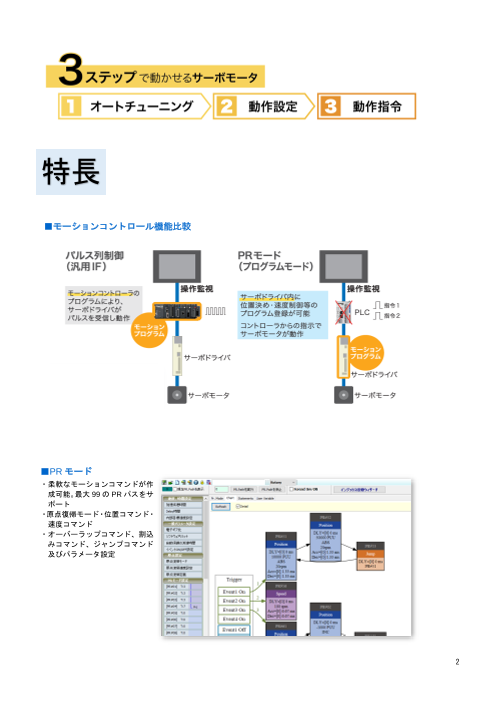
■モーションコントロール機能比較
■PR モード
・柔軟なモーションコマンドが作
成可能。最大 99 の PR パスをサ
ポート
・原点復帰モード・位置コマンド・
速度コマンド
・オーバーラップコマンド、割込
みコマンド、ジャンプコマンド
及びパラメータ設定
2
Page3
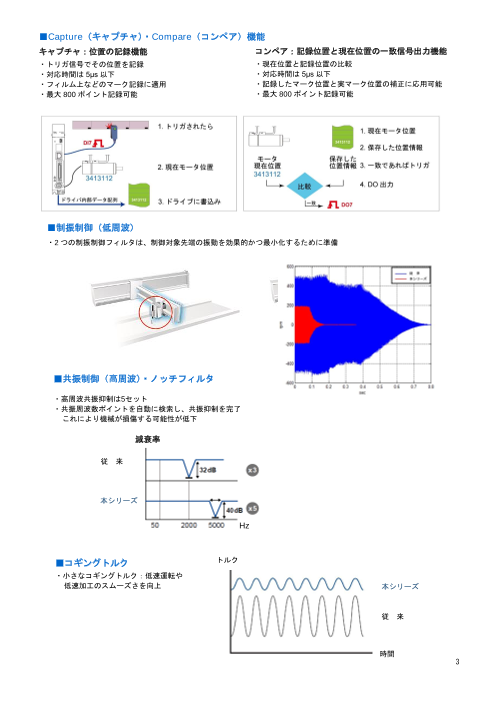
■Capture(キャプチャ)・Compare(コンペア)機能
キャプチャ:位置の記録機能 コンペア:記録位置と現在位置の一致信号出力機能
・トリガ信号でその位置を記録
・現在位置と記録位置の比較
・対応時間は 5μs 以下 ・対応時間は 5μs 以下
・フィルム上などのマーク記録に適用 ・記録したマーク位置と実マーク位置の補正に応用可能
・最大 800 ポイント記録可能 ・最大 800 ポイント記録可能
■制振制御(低周波)
・2 つの制振制御フィルタは、制御対象先端の振動を効果的かつ最小化するために準備
■共振制御(⾼周波)・ノッチフィルタ
・高周波共振抑制は5セット
・共振周波数ポイントを自動に検索し、共振抑制を完了
これにより機械が損傷する可能性が低下
減衰率
従 来
従来
調整可能な帯域
本シリーズ
本シリーズ
Hz
■コギングトルク トルク
・小さなコギングトルク:低速運転や
低速加工のスムーズさを向上 本シリーズ
従 来
時間
3
Page4
ソフトウェア KSD-Soft
■オートチューニング機能
・ユーザーがサーボシステムを使用する障壁を低下
・この機能は少ない調整作業で機械のパフォーマンスを最適化
・操作パネル若しくはソフトウェアを介して実行可能
* 当社ホームページで会員登録し
ダウンロード
■電子カム機能
・最大 720 ポイント分割の電子カム搭載、カムプロファイルを
簡単に作成可能
・編集ソフトウェア KSD-Soft で対応
4
Page5
■オシロスコープ内蔵
・16 ビットデータサイズで最大 8 チャネル、更新周波数 10kHz
・32 ビットデータを備えた 4 つの高解像度チャネルサイズ、更新周波数 10kHz
・16 ビットデータサイズの高サンプルレート4チャネル、更新周波数 20kHz
・使い勝手の良い編集画面は、PR モード用にデザイン
・原点復帰モード、位置決めなど、その他の複数位置制御を容易に設定
5
Page6
各部の名称と機能
●制御回路電源入力端子 (L1C、L2C)
AC200~230V、50/60Hz 単相電源の接続に
使用
●直流リアクトル入力端子 (P1、P2)
DC リアクトルなし:短絡 P1 および P2
DC リアクトル付き:P1 と P2 を接続
●メイン回路電源入力端子 (R、S、T)
サーボドライバの主回路に接続するために
使用
AC200-230V、50/60Hz の単相または三相
電源を接続
●PC接続ポート (CN4)
PC を接続してソフトウェア KSD-Soft を
操作するために使用(ミニ USB タイプ B
ポート)
●RS-485 通信ポートコネクタ (CN3)
Modbus 通信プロトコル対応(RJ45)
●I/Oコネクタ (CN1)
PLC またはその他のコントローラを接続
するために使用
●エンコーダコネクタ (CN2)
サーボモータのエンコーダの接続に使用
400W サーボドライバ(正面)
6
Page7
LED 表示
操作パネル
電源ランプ
●外部エンコーダ用コネクタ (CN5)
A,B,Z 位相信号を受信するための外部リ
ニアスケールまたはエンコーダの接続に
使用
●サーボモータ出力 (UVW)
サーボモータの端子 U,V,W の接続に使用
[注意]
誤ったケーブルが接続された場合、AC ドラ
イバが修理できないほど損傷する可能性が
あるため、出力端子を主回路電源に接続し
ないでください。
●回生抵抗端子またはブレーキユニット端
子 (P3 DC)
内部抵抗を使用:回路が P3 と D の間を短
絡、回路が P3 と C の間で開放されている
ことを確認
外部抵抗を使用:P3 と C に接続し、P3 と
D の間で開放されていることを確認
外部ブレーキユニットを使用する場合は、
それを P3 に接続し P3 と D、P3 と C の間
で開放されているかを確認
●アース端子
電源とサーボモータの接地線の接続に使用
●ヒートシンク
サーボドライバの固定と放熱に使用
400W サーボドライバ(底面) 7
Page8
サーボドライバ仕様
型番 KSD-A3-○ 0121-L 0221-L 0421-L 0721-L
電源仕様 単相/三相 AC220 V,50/60Hz
許容電圧変動 単相/三相 AC200 ~ 230 V、-15% ~ 10%
電源 入力電流(3PH) 単位:Arms 0.67 1.34 2.67 5.01
入力電流(1PH) 単位:Arms 1.16 2.31 4.63 8.68
連続出力電流 単位:Arms 0.9 1.55 2.6 5.1
冷却方式 自然冷却 ファン冷却
ドライブ分解能 24-bit (16777216 p/rev)
主回路制御方法 SVPWM 制御
チューニングモード 手動/自動
回生抵抗 なし 内蔵
パルス指令モード パルス+符号;CCW パルス +CW パルス;A 相 +B 相
最大入力パルス周波数 パルス+符号:4 Mpps;CCW パルス +CW パルス:4 Mpps;
A 相 +B 相:単相 4 Mpps;オープンコレクタ伝送方式:200 Kpps
指令制御方式 外部パルス制御/内部データ制御
位置制御 指令平滑方式 ローパスフィルタ及び S 曲線フィルタ
モード 電子ギヤ 電子ギヤ比:N/M 倍、限定条件は (1 / 4 < N / M < 262144)です
N:1 ~ 536870911/M:1 ~ 2147483647
トルク制限 パラメータ設定
フィードフォワード パラメータ設定
電圧範囲 0 ~ ±10 VDC
解像度 15-bit
アナログ指令入力
入力インピーダンス 1 M
時定数 25 µs
速度制御範囲*1 1:6000
速度制御 指令制御方式 外部アナログ/内部データ
モード 指令平滑方式 ローパスフィリタ及び S 曲線フィルタ
トルク制限 パラメータ設定/アナログ入力
周波数特性 最大 3.1 kHz (クローズドループ)
負荷変動 (0 ~ 100%)最大で±0.01%
速度精度*2 電源 ±10%、最大変動±0.01%
動作温度 (0 ~ 50˚C)、最大±0.01%
電圧範囲 0 ~ ±10 VDC
アナログ指令入力 入力抵抗 1 M
トルク制御 時定数 25 µs
モード 指令制御方式 外部アナログ命令制御/内部データ
指令平滑方式 ローパスフィルタ
速度制限 パラメータ設定/アナログ入力
アナログモニタリング出力 パラメータ設定 (出力電圧範囲:±8 V);解像度:10-bit
サーボ ON、エラーリセット、ゲイン切り換え、パルスクリア、ゼロクランプ、コマンド入力反転、コマンドトリ
ガ、トルク制限、速度制限、内部位置指令選択、モータ停止、内部速度指令選択、PT/S 制御切り換え、PR/S 制御
切り替え、S/T 切り換え、PT/T 制御切り換え、PT/PR 制御切り換え、PT/PR/S 制御切り替え、非常停止、正転/
逆転禁止リミット、復帰トリガ、正/逆方向トルク制限、原点復帰、電子カム勘合、正転/逆転ジョグ入力、PR
入力 指令トリガ、電子ギヤ比分子選択、パルス入力禁止
*上記 DI 入力はフィールドバス制御では使用不可。通信制御を利用時、DI 入力機能は通信制御で使用し、DI 入
デジタル 力は緊急停止、正転/逆転禁止及び原点復帰だけ使用してください。
入出力 PT:位置制御モード(外部パルス)、PR:位置制御モード(内部データ)、S:速度制御モード(外部アナログ/内
部データ)、T:トルク制御モード(外部アナログ/内部データ)
A、B、Z ラインドライバー (Line Driver) 出力
サーボレディ、サーボオン、ゼロ速検出、速度到達、位置到達、トルク限制中、サーボアラーム、電磁ブレーキ、
出力 原点復帰完了、過負荷警告、インポジション中、位置命令オーバーフロー、ソフトウェアリミット (逆転方向)、
ソフトウェアリミット(正転方向)、PR 実行完了、Capture プロセス完了、コマンドプロセス完了、E-Cam の Master
位置が設定エリア内
過電流、過電圧、電圧不足、オーバーヒート、回生異常、過負荷、速度誤差過大、位置誤差過大、エンコーダ異常、
保護機能 校正異常、緊急停止、逆方向/正方向リミット異常、フルクローズドループ位置誤差過大、シリアル通信異常、主
回路電源欠相、シリアル通信タイムアウト、U、V、W と CN1、CN2、CN3 端子短絡保護
通信インタフェース RS-485/USB
設置場所 屋内(直射日光が当たらないこと)、腐食性ガス、引火性ガス、オイルミスト、塵埃のないこと
標高 標高 2000m 以下
気圧 86 kPa ~ 106 kPa
動作温度範囲 0˚C ~ 55˚C (動作周囲温度が 45˚C 以上となる場合、周辺の空気を強制循環させてください)
保存温度範囲 -20˚C ~ 65˚C
湿度 0 ~ 90% RH 未満 (結露なきこと)
環境規格 振動 20 Hz 以下は 9.8 m/s
2 (1 G),20 ~ 50 Hz 5.9 m/s2 (0.6 G)
IP 保護等級 IP20
電力系統 TN 系統
IEC/EN 61800-5-1,UL 508C
認証規格
8
Page9
サーボモータ仕様
型番 KSV-B3○ 0401 0602 0604 0807
定格出力 (kW) 0.1 0.2 0.4 0.75
定格トルク (N-m)*1 0.32 0.64 1.27 2.4
最大トルク (N-m) 1.12 2.24 4.45 8.4
定格回転速度 (r/min) 3000
最大回転速度 (r/min) 6000
定格電流 (Arms) 0.857 1.42 2.40 4.27
最大電流 (Arms) 3.44 6.62 9.47 15.8
毎秒最大出力 (kW/s) 34.25 29.05 63.50 53.83
ローター慣性モーメント (× 10-4kg.m2) 0.0299 0.141 0.254 1.07
機械的定数 (ms) 0.50 0.91 0.52 0.54
トルク定数-KT (N-m/A) 0.374 0.45 0.53 0.56
電圧定数-KE (mV/(r/min)) 13.8 16.96 19.76 20.17
電機子抵抗 (Ohm) 8.22 4.71 2.04 0.55
電機子インダクタンス (mH) 19.1 12.18 6.50 2.81
電気的定数 (ms) 2.32 2.59 3.19 5.11
絶縁クラス A 級 (UL)、B 級(CE)
絶縁抵抗 100 M、DC 500 V 以上
絶縁強度 1.8k Vac、1 秒
質量–ブレーキ無し (kg) 0.5 0.9 1.2 2.34
質量–ブレーキ有り (kg) 0.7 1.3 1.6 3.15
ラジアル軸最大荷重 (N) 78 245 245 392
スラスト軸最大荷重 (N) 54 74 74 147
毎秒最大出力 (kW/s) 32.51 27.13 61.09 50.97
ローター慣性モーメント (× 10-4kg.m2) 0.0315 0.151 0.264 1.13
機械的定数 (ms) 0.53 0.97 0.54 0.57
ブレーキ仕様 保持トルク [Nt-m (min)] *2 0.3 1.3 1.3 2.5
消費電力 (at 20˚C)[W] 6.1 7.6 7.6 8
解放時間 [ms (Max)] 20 20 20 20
制動時間 [ms (Max)] 35 50 50 60
オイルシール 減定格率 (%) 90 90 95 95
振動等級 (μm) V15
使用温度 (˚C) -20˚C ~ 60˚C
保存温度 (˚C) -20˚C ~ 80˚C
使用周囲湿度 20 ~ 90%RH (結露なきこと)
保存湿度 20 ~ 90%RH (結露なきこと)
耐振性 24.5 m/s2 (2.5 G)
IP67
IP 保護等級 防水コネクタ使用時、及び適切なオイルシールが回転軸に装着されている場合
(オイルシールモデルの場合)
認証規格
サーボモータ 出力 T-N 曲線
トルク (N-m) トルク (N-m)
1.12 (350%) 2.24 (350%)
トルク (N-m) トルク (N-m)
断続使用領域 2.24 (350%)1.30 (203%) 1.12 (350%)断続使用領域
0.52 (162%)
0.32 (100%) 0.64 (100%) 断続使用領域 1.30 (203%) 断続使用領域
0.16 (50%) 連続使用領域 0.52 (162%)0.32 (55%)
速度 連続使用領域 速度
-1
(mIn ) -1(mIn )
3000 3300 6000
3000 6000 0.32 (100%) 0.64 (100%)
0.16 (50%) 連続使用領域 0.32 (55%)
速度 連続使用領域 速度 -1 (mIn ) -1 (mIn )
3000 3300 6000
3000 6000
トルク (N-m) トルク (N-m)
4.45 (350%) 8.4 (350%)
6 (250%)
2.81 (221%) 断続使用領域 断続使用領域
1.27 (100%) 2.4 (100%)
0.64 (50%) 連続使用領域 1.2 (50%) 連続使用領域
速度 速度
-1
(mIn-1) (mIn )
3000 3300 6000 3000 3700 6000
9
KSV-B3M-CY0604RS1 KSV-B3L-CY0401RS1
KSV-B3M-CY0604SS1 KSV-B3L-CY0401SS1
KSV-B3M-CY0807RS1 KSV-B3M-CY0602RS1
KSV-B3M-CY0807SS1 KSV-B3M-CY0602SS1
KSV-B3L-CY0401RS1
KSV-B3L-CY0401SS1
KSV-B3M-CY0602RS1
KSV-B3M-CY0602SS1
Page10
サーボドライバ外形寸法 トルク (N-m) トルク (N-m)4.45 (350%) 8.4 (350%)
KSD-A3-0121-L、 KSD-A3-0221-L、 KSD-A3-0421-L KSD-A3-0721-L 6 (250%)
2.81 (221%) 断続使用領域 断続使用領域
50(2)
50(2) 180(7.1) 36.3(1.43) 5.5(0.22)
1.27 (100%) 2.4 (100%)
M5*0.8 0.64 (50%) 連続使用領域 1.2 (50%) 連続使用領域
速度 速度
-1 -1
(mIn ) (mIn )
3000 3300 6000 3000 3700 6000
70(2.8) M5*0.8
バックプレートのロッ バックプレートのロッ
クは付録の図示の通り クは付録の図示の通り
1.37N・m Unit: mm (inch)
1.37N・m
サーボモータ外形寸法
B3L-CY0401RS1 B3M-CY0602RS1 B3M-CY0604RS1 B3M-CY0807RS1
型番 KSV-
B3L-CY0401SS1 B3M-CY0602SS1 B3M-CY0604SS1 B3M-CY0807SS1
LC 40 60 60 80
LZ 4.5 5.5 5.5 6.6
LA 46 70 70 90
S 8 14 14 19
LB 30 50 50 70
ブレーキ無し 77.6 72.5 91.0 105.2
LL
ブレーキ付き 111.7 109.4 127.9 144.8
LH 300 300 300 300
LP 300 300 300 300
H 40 48.5 48.5 58.5
LR 25 30 30 35
LE 2.5 3 3 3
LG 5 7.5 7.5 8
LW 16 20 20 25
RH 6.2 11 11 15.5
WK 3 5 5 6
W 3 5 5 6
T 3 5 5 6
P M3 Depth 8 M4 Depth 15 M4 Depth 15 M6 Depth 20
10
180(7.2)
160(6.3)
180(7.2)
2.1(0.08) 172.5(6.9)
KSV-B3M-CY0604RS1
KSV-B3M-CY0604SS1
KSV-B3M-CY0807RS1
KSV-B3M-CY0807SS1
Page11
標準結線方法
■位置(PT)モード ■位置(PR)モード
サーボドライバ サーボドライバ
MCCB MCCB
MC MC
AC 200 / 230V R AC 200 / 230V R
P3 P3
三相 S 三相 S
回生抵抗 回生抵抗
50 / 60 Hz DT 50 / 60 Hz
D
T
C C
赤 赤
L1C LU 1C U
L 白2C L
白
V 2C V
黒 黒
P1 W P1 W
P2 緑 P2 緑
電源 電源
CN1
// SIIGN 37
24V BRKR EMGS ブレーキ 24V BRKR EMGS ブレーキ
SIIGN 36
パルス命令入力
(Line Driver) /PULSE 41
1.2 kΩ エンコーダ 1.2 kΩ エンコーダ
PULSE 43 CN1
±10V 10kΩ T-REF 18 ±10V 10kΩ T-REF 18
12 kΩ 12 kΩ
GND 19 GND 19
ツ ツCN2
イ MON1 16 隔イ MON1 16
CN2
隔ス 10kΩ ス 10k
離 GND 13 1 +5V 離
Ω
ト GND 13 1 +5V
線ト 線
ペ 10kΩ ペ 10k2 GND Ω
ア MON2 15 ア MON2 15 2 GND
COM+ 11 5 T+ COM+ 11 5 T+
Ω
SON DI1 9 4.7 k 6 T- SON DI1 9 4.7 k
Ω 6 T-
SG SG
CCLR DI2 10 4.7 kΩ Case Shielding CCLR DI2 10 4.7 kΩ Case Shieldingツ ツ
4.7 kΩ イ 4.7 kΩ イ
TCM0 DI3 34 ス TCM0 DI3 34 ス
4.7 kΩ ト 4.7 kΩ ト
TCM1 DI4 8 ペ TCM1 DI4 8 ペ
4.7 kΩ
ARST CN3
ア 4.7 kΩ ア
DI5 33 隔 ARST
CN3
DI5 33 隔
4.7 kΩ 6,8 - 離 4.7 kΩ 6,8 - 離
NL DI6 32 線 NL DI6 32 線
4.7 kΩ 5 RS485+ 4.7 kΩ 5 RS485+
PL DI7 31 PL DI7 31
4.7 kΩ 4 RS485- 4.7 kΩ 4 RS485-
EMGS DI8 30 EMGS DI8 30
4.7 kΩ 3,7 GND_ISO 4.7 kΩ 3,7 GND_ISO
DI9 29 DI9 29
- -
4.7 kΩ 2 4.7 kΩ 2
DI10 38 DI10 38
1 - 1 -
DO1+ 7 DO1+ 7
SRDY SRDY
1.5 kΩ 1.5 kΩ
DO1- 6 DO1- 6
24V DO2+ 5 CN4 24V DO2+ 5 CN4
ZSPD Ω Mini USB ZSPD1.5 k 1.5 kΩDO2- 4 DO2- 4 Mini USB
DO3+ 3 DO3+ 3
HOME HOME
1.5 kΩ DO3- 2 1.5 kΩ DO3- 2
DO4+ 1 CN5 DO4+ 1 CN5
TPOS TPOS
1.5 kΩ ΩDO4- 26 1.5 k8 +5V DO4- 26 8 +5V
DO5+ 28 4 Opt A DO5+ 28 4 Opt A
ALRM ALRM
1.5 kΩ DO5- 27 1.5 kΩ5 Opt /A DO5- 27 5 Opt /A
DO6+ 46 3 Opt B DO6+ 46 3 Opt B
1.5 kΩ DO6- 40 Ω2 Opt /B 1.5 k DO6- 40 2 Opt /B
9 Opt Z 9 Opt Z
OA 21 OA 21
A 位相差信号 1 Opt /Z A 位相差信号 1 Opt /Z
/OA 22 /OA 22
6 GND 6 GND
OB 25 OB 25
B
パエ 位相差信号
7 GND B 位相差信号 7 GND
/OB 23 パエ /OB 23
ルン 10 - ルン 10 -
スコ OZ 50 スコ OZ 50
出ー Z 位相差信号 11 - 出ー Z 位相差信号 11 -
力ダ /OZ 24 力ダ /OZ 24
12 - 12 -
13 - 13 -
Z相オープン OCZ 48 Z相オープン OCZ 4814 - 14 -
コレクタ信号 GND 44 コレクタ信号 GND 44
15 - 15 -
最大出力電流: 50 mA 最大出力電流: 50 mA
電圧: 30V 電圧: 30V
オプション品
名称 概要 型番
3m、耐屈曲仕様 ACS3-CAEB1003
エンコーダケーブル 5m、耐屈曲仕様 ACS3-CAEB1005
アブソリュート 10m、耐屈曲仕様 ACS3-CAEB1010
20m、耐屈曲仕様 ACS3-CAEB1020
3m、耐屈曲仕様 ACS3-CAPF1103
動力ケーブル 5m、耐屈曲仕様 ACS3-CAPF1105
ブレーキ無 10m、耐屈曲仕様 ACS3-CAPF1110
20m、耐屈曲仕様 ACS3-CAPF1120
3m、耐屈曲仕様 ACS3-CAPF2103
動力ケーブル 5m、耐屈曲仕様 ACS3-CAPF2105
ブレーキ有 10m、耐屈曲仕様 ACS3-CAPF2110
20m、耐屈曲仕様 ACS3-CAPF2120
PC/サーボ変換アダプタセット PC-サーボドライバ接続ケーブル 1.5m、変換アダプタセット UC-PRG015-01B
PC/サーボ変換アダプタ 変換アダプタのみ UC-ADP01-A
変換アダプタ用 USB ケーブル PC-サーボドライバ接続ケーブル 1.5m UC-PRG015-01A
CN3 分岐コネクタ RS485 通信、2 チャンネル ACS3-CNADC3RC
CN1 端子台セット CN1(DIO)接続ケーブル、中継端子台セット ACS3-MDTB5000
CN1 イージーコネクタ CN1 簡易配線用端子台コネクタ ACS3-IFSC5020
バッテリボックス エンコーダバックアップ用電池 ASD-MDBT0100
11
Page12
トルク (N-m) トルク (N-m)
1.12 (350%) 2.24 (350%)
断続使用領域 1.30 (203%) 断続使用領域0.52 (162%)
0.32 (100%) 0.64 (100%)
0.16 (50%) 連続使用領域 0.32 (55%)
速度 連続使用領域
(rpm) 速度
3000 3300 6000 (rpm)
3000 6000
トルク (N-m) トルク (N-m)
4.45 (350%) 8.4 (350%)
6 (250%)
2.81 (221%) 断続使用領域 断続使用領域
1.27 (100%) 2.4 (100%)
0.64 (50%) 連続使用領域 1.2 (50%) 連続使用領域
速度 速度
(rpm) (rpm)
3000 3300 6000 3000 3700 6000
CAT. ED2007001-1
KSV-B3M-CY0604RS1 KSV-B3L-CY0401RS1
KSV-B3M-CY0604SS1 KSV-B3L-CY0401SS1
KSV-B3M-CY0807RS1 KSV-B3M-CY0602RS1
KSV-B3M-CY0807SS1 KSV-B3M-CY0602SS1